filmov
tv
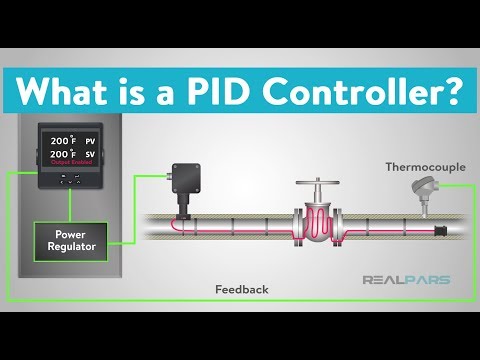
What is a PID Controller?

Показать описание
▶ Check out the full blog post over at
==========================
Today you will learn about PIDs. Specifically, what they are and when do we use them with automation and PLCs.
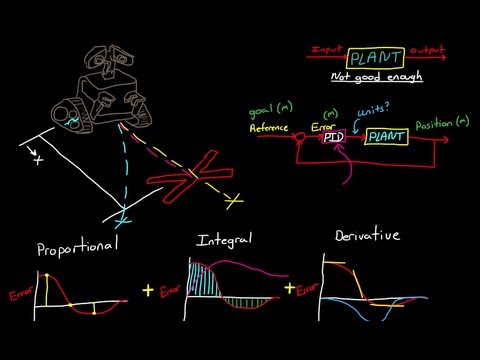
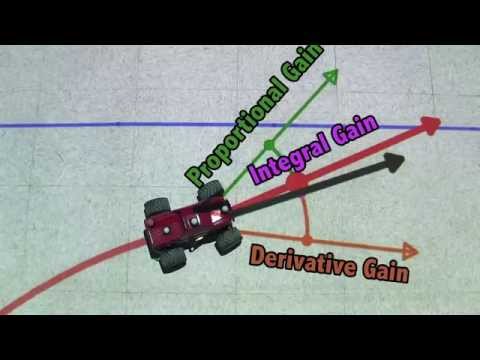
PID is an acronym that stands for Proportional, Integral, Derivative.
It can keep an automated process like temperature, pressure, or flow constant for you automatically.
PIDs use a control loop feedback or process variable to monitor where the output should be.
These usually come in the form of sensors and meters.
PIDs come in many different forms including standalone units and PLC programming.
We can use our input and output cards along with programming software to set up a PID.
==========================
Missed our most recent videos? Watch them here:
=============================
To stay up to date with our last videos and more lessons, make sure to subscribe to this YouTube channel:
=============================
=============================
#RealPars
 0:05:39
0:05:39
What is a PID Controller?
 0:09:25
0:09:25
PID Controller Explained
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:07:44
0:07:44
PID Control - A brief introduction
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:13:07
0:13:07
PIDs Simplified
 0:49:18
0:49:18
Introduction to PID Control
 0:09:49
0:09:49
Optimizing PID Controller Performance for Boost Converter in MATLAB |PID Controller Boost Converter
 0:08:43
0:08:43
How to Tune a PID Controller
 0:01:26
0:01:26
What is a PID Controller and how does it work?
 0:10:33
0:10:33
PID vs. Other Control Methods: What's the Best Choice
 0:11:32
0:11:32
What is a PID Controller?
 0:03:28
0:03:28
What is a PID controller?
 0:13:10
0:13:10
Simple Examples of PID Control
 0:13:13
0:13:13
PID Balance+Ball | full explanation & tuning
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:07:33
0:07:33
What are PID Tuning Parameters?
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:10:10
0:10:10
What is PID Controller in PLC/ DCS?
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:04:41
0:04:41
Controlling Self Driving Cars
 0:11:17
0:11:17
Proportional Integral Derivative PID Controller
Комментарии