filmov
tv
PID vs. Other Control Methods: What's the Best Choice

Показать описание
▶ You can read the full post here:
⌚Timestamps:
00:00 - Intro
01:35 - PID Control
03:13 - Components of PID control
04:27 - Fuzzy Logic Control
07:12 - Model Predictive Control
09:25 - Summary
Almost everyone who has worked in automated systems and manufacturing industries will likely tell you that the gold plate standard for process control applications is PID Control. Most industrial control loops utilize some combination of PID control.
In this video, we’ll discuss PID control and we’ll also introduce you to two advanced techniques: Fuzzy Logic Control and Model Predictive Control (MPC).
Let’s start with a discussion about a very basic process control technique called ON/OFF or Bang-Bang Control.
This technique is very common and found in applications such as home heating where a furnace is either ON or OFF. What we end up with is a continuous temperature fluctuation around the desired setpoint.
Next up on the list is a feedback control algorithm called PID control.
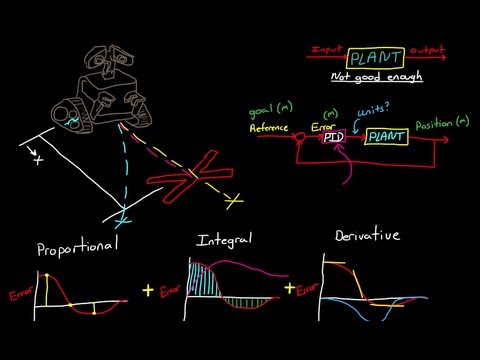
The 3 main components are Proportional, Integral, and Derivative.
PID control is very versatile and goes a long way to ensure that the actual process under control is held as closely as possible to the setpoint regardless of disturbances, or setpoint changes.
Controller tuning involves a procedure where each component of the PID algorithm is adjusted to produce the desired response to setpoint changes or disturbances.
The Proportional component applies an effort in proportion to how far the process is away from the setpoint.
The Integral component applies an effort to return the process to the setpoint after the Proportional control quits.
The Derivative component looks at the speed at which the process is moving away from the setpoint.
Each component contributes a unique signal that is added together to create the controller output signal.
Let’s move on to advanced process control techniques.
We’ll start with Fuzzy Logic Control (FLC).
Fuzzification is the process of converting specific input values into some degree of membership of fuzzy sets based on how well they fit. Membership functions describe the degree of membership of a particular input or output variable to linguistic variables such as Temperature and Fan Speed.
These membership functions can be represented graphically where each fuzzy set has a degree of membership to a temperature range based on the room temperature.
What is a fuzzy set?
A fuzzy set relates to membership linguistic variables. For example, a linguistic variable Temperature might have fuzzy sets like hot, warm, and cold, each with its membership function.
Next up for discussion is MPC.
MPC is a feedback control technique that uses a mathematical model to predict the behavior of the process variable.
Let’s look at a block diagram of MPC for a robotic system.
We’ll start with the MPC controller components.
The MPC Controller uses the robot model, kinematics, and dynamics to calculate the optimal control inputs over a predetermined, limited period. The output of the MPC controller is the calculated control input trajectory for the robot.
The Reference block represents the desired robot behavior including things like gripper positions, orientations, and motions to follow also referred to as Trajectories.
The Kinematics and dynamics block provides a mathematical description of how control inputs affect the robot's movements, rotations, and joint angles.
The Optimization block represents the algorithm within the MPC controller.
Finally, the Control Inputs Block represents the actual control inputs that are applied to the robot as determined by the optimization algorithm.
=============================
Did you miss out on the latest and greatest? Catch up now by watching our videos right here:
=============================
=============================
#PIDControl #IndustrialControl #RealPars
 0:10:33
0:10:33
PID vs. Other Control Methods: What's the Best Choice
 0:09:25
0:09:25
PID Controller Explained
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:07:44
0:07:44
PID Control - A brief introduction
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:16:08
0:16:08
Everything You Need to Know About Control Theory
 0:41:19
0:41:19
PID controller design - considerations and methods
 0:07:08
0:07:08
Empirical PID gain tuning (Kevin Lynch)
 0:08:43
0:08:43
How to Tune a PID Controller
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:13:07
0:13:07
PIDs Simplified
 0:02:43
0:02:43
PID VS Model Predictive Control (MPC) - (Enrollment link in the description)
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:00:55
0:00:55
What is PID Tuning? (Answered with an example) #engineering #pid
 0:10:06
0:10:06
PID Velocity vs Positional Equation - Studio 5000 PIDE Instruction
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:03:16
0:03:16
PID control
 0:05:16
0:05:16
PID Controller Tuning Easy Method | What are P, I and D terms ?
 0:21:28
0:21:28
PID controller Simple explanation with a Quadcopter as example.
 0:00:13
0:00:13
Tuning PID Controller Funny Clip #shorts
 0:30:30
0:30:30
Interpretable PID Parameter Tuning for Control Engineering ... by Klaus Diepold
 0:00:45
0:00:45
Python PID SOPDT Tuning: Method 4 - AutoTuner with Adaptive Control
 0:12:14
0:12:14
PID Control Fundamentals (Lectures on Control Systems)
 0:00:16
0:00:16
Modelling and design of PID controller for voltage control of AC hybrid micro-grid
Комментарии