filmov
tv
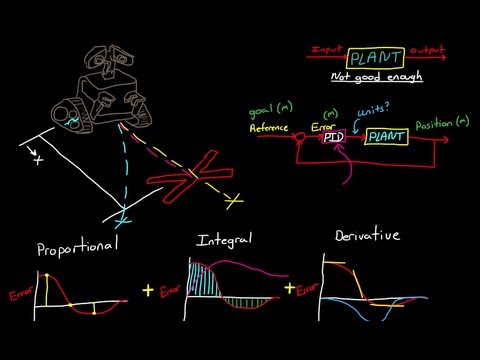
PIDs Simplified

Показать описание
Taking an extremely simplified look at what P I and D are and how they relate to each other.
 0:13:07
0:13:07
PIDs Simplified
 0:09:25
0:09:25
PID Controller Explained
 0:07:44
0:07:44
PID Control - A brief introduction
 0:05:39
0:05:39
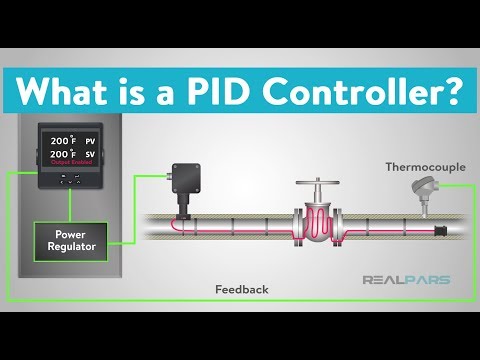
What is a PID Controller?
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:13:10
0:13:10
Simple Examples of PID Control
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:00:48
0:00:48
Very easy sunset painting with poster colour | #shorts
 0:08:43
0:08:43
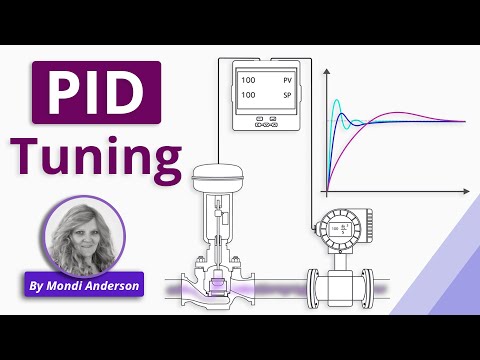
How to Tune a PID Controller
 0:00:46
0:00:46
PID Control: The Basics #shorts #thecircuithelper
 0:00:10
0:00:10
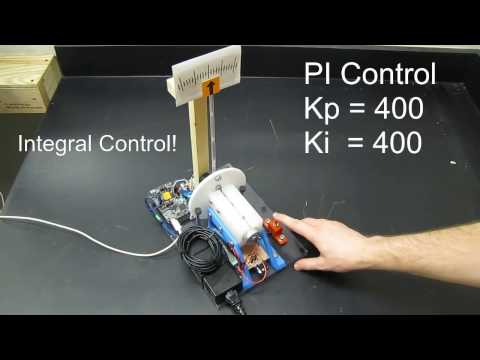
How PID Controllers work | Practical Demonstration
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:49:18
0:49:18
Introduction to PID Control
 0:00:27
0:00:27
PID tunning of quadcopter
 0:10:36
0:10:36
What does a PID controller do?
 0:03:28
0:03:28
What is a PID controller?
 0:18:14
0:18:14
How to Tune a PID Controller
 0:00:24
0:00:24
A few hours after farrowing! New piglets here.#farm #pigs #shorts #goals #business #investment
 0:16:57
0:16:57
Somebody finally made PID tuning make sense | Chris Rosser PID tune method | Part 1
 0:00:20
0:00:20
4/6 Quadcopter PID Parameter Tuning - P gain ok, D gain too high
 0:02:48
0:02:48
PID Tuning In 10 Easy Steps
Комментарии