filmov
tv
EEVacademy #6 - PID Controllers Explained

Показать описание
David explains PID controllers.
First part of a mini-series on control theory.
Support the EEVblog through Patreon!
Donate With Bitcoin & Other Crypto Currencies!
EEVblog Amazon Store (Dave gets a cut):
First part of a mini-series on control theory.
Support the EEVblog through Patreon!
Donate With Bitcoin & Other Crypto Currencies!
EEVblog Amazon Store (Dave gets a cut):
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:09:25
0:09:25
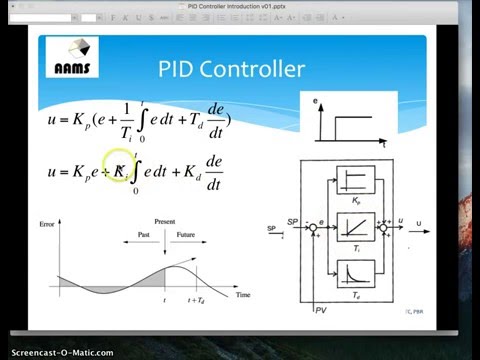
PID Controller Explained
 0:13:10
0:13:10
Simple Examples of PID Control
 0:13:31
0:13:31
Manual and Automatic PID Tuning Methods | Understanding PID Control, Part 6
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:20:06
0:20:06
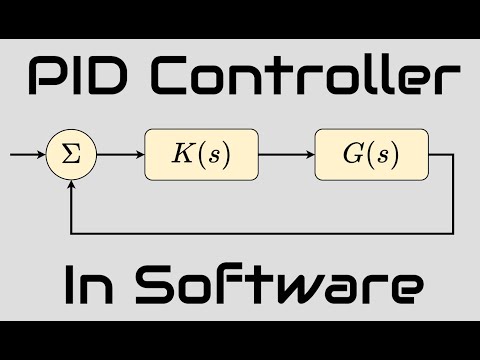
PID Controller Implementation in Software - Phil's Lab #6
 0:00:32
0:00:32
PID control without D
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:07:08
0:07:08
Empirical PID gain tuning (Kevin Lynch)
 0:00:06
0:00:06
Learning Robotics : When your PID Controller is just WRONG!
 0:02:58
0:02:58
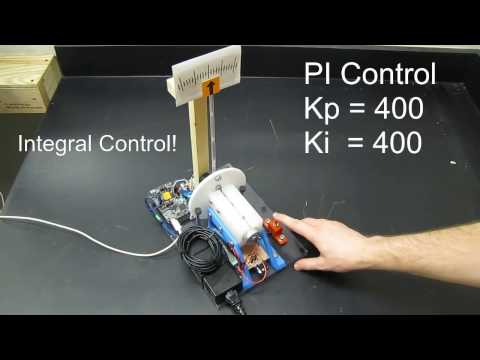
Hardware Demo of a Digital PID Controller
 0:12:47
0:12:47
Learn the PID control in 12 minutes | electronics
 0:00:05
0:00:05
Old Robot PID tuning
 0:03:16
0:03:16
PID control
 0:01:01
0:01:01
P, PI, PID Controllers
 0:08:43
0:08:43
How to Tune a PID Controller
 0:01:16
0:01:16
PID Control in one minute
 0:04:19
0:04:19
PID Control Basic auto cruise control and flight speed control technology
 0:07:09
0:07:09
PID Controller Example
 0:01:22
0:01:22
Instructor Demo of PID Control of Pan-Servo Mechanism
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:13:27
0:13:27
PID control Basic
 0:06:52
0:06:52
PID Controller in action demonstration
 0:30:30
0:30:30
Interpretable PID Parameter Tuning for Control Engineering ... by Klaus Diepold
Комментарии