filmov
tv
PID controller Simple explanation with a Quadcopter as example.

Показать описание
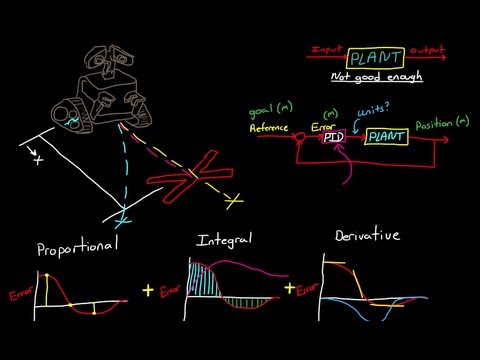
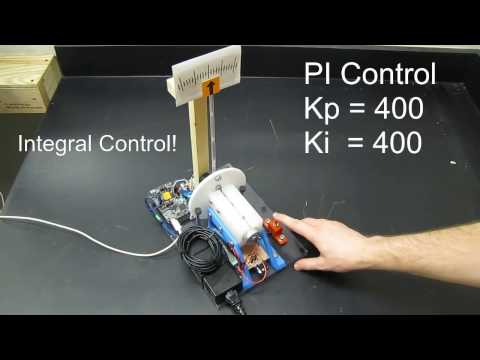
This video is about a pid controller with a practical example. You will briefly know what a pid controller is and understand the variation of gains in pid loop. The integral gain is crucial in any process*.
Please leave any suggestions in comments.
Resources:
For esp32 flight controller and WiFi pid tuning code.
References:
Please leave any suggestions in comments.
Resources:
For esp32 flight controller and WiFi pid tuning code.
References:
 0:09:25
0:09:25
PID Controller Explained
 0:21:28
0:21:28
PID controller Simple explanation with a Quadcopter as example.
 0:05:39
0:05:39
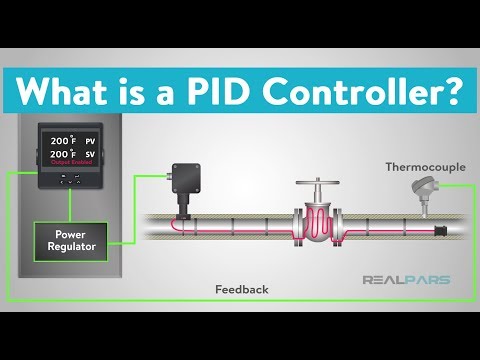
What is a PID Controller?
 0:07:44
0:07:44
PID Control - A brief introduction
 0:13:07
0:13:07
PIDs Simplified
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:13:10
0:13:10
Simple Examples of PID Control
 0:11:32
0:11:32
What is a PID Controller?
 0:10:02
0:10:02
PID Controllers made simple!
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:02:20
0:02:20
What is PID? The fast explanation
 0:00:46
0:00:46
PID Control: The Basics #shorts #thecircuithelper
 0:49:18
0:49:18
Introduction to PID Control
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:08:43
0:08:43
How to Tune a PID Controller
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:04:41
0:04:41
Controlling Self Driving Cars
 0:03:28
0:03:28
What is a PID controller?
 0:14:34
0:14:34
How to Tune a PID Controller - Made Simple!
 0:05:16
0:05:16
PID Controller Tuning Easy Method | What are P, I and D terms ?
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:13:13
0:13:13
PID Balance+Ball | full explanation & tuning
Комментарии