filmov
tv
Euler vs Quaternion - What's the difference?

Показать описание
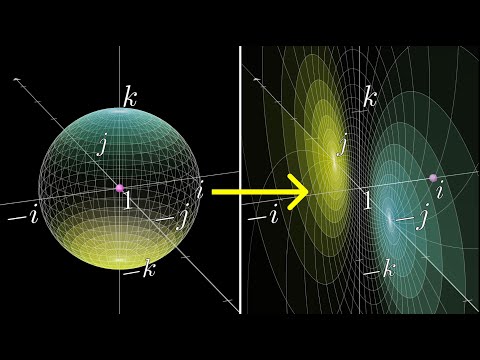
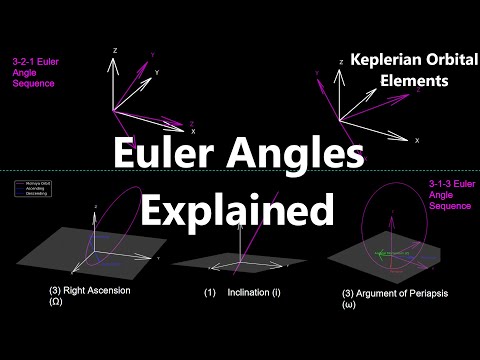
3D software describes orientation and interprets rotation using math, and the most common way to do this is with Euler and Quaternion Values. Euler is the common X, Y, and Z, 3 dimensional, ordered, series of values that suffers from gimbal lock. Quaternion represents the W, X, Y, and Z 4 dimensional, spherically interpolating (SLERP), series of values that do not suffer from gimbal lock; Though, may be harder to visualize.
Resources:
Media Used:
- Ferris Bueller Clip: TM & © Paramount (1986)
Resources:
Media Used:
- Ferris Bueller Clip: TM & © Paramount (1986)
 0:08:49
0:08:49
Euler vs Quaternion - What's the difference?
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:10:12
0:10:12
10 mins GameDev tips - Quaternions
 0:15:52
0:15:52
Quaternion or Euler, understanding rotation in Blender
 0:05:49
0:05:49
Basic Intro to Quaternions for 3D Rotations
 0:07:50
0:07:50
Euler angles - Insights
 0:23:49
0:23:49
Unit Quaternions in Robotics + Great Demos | Fundamentals of Robotics | Lesson 12
 0:20:33
0:20:33
a quaternion version of Euler's formula
 0:04:12
0:04:12
Quaternion vs Euler Attitude Control
 0:25:35
0:25:35
Euler's Formula for the Quaternions
 0:00:41
0:00:41
Quaternions Are Not Four-Dimensional Objects
 0:18:52
0:18:52
Godot's Quaternion Variant is Beautiful (and misunderstood)
 0:31:51
0:31:51
Visualizing quaternions (4d numbers) with stereographic projection
 0:01:00
0:01:00
🛞 What is quaternion rotation? Blender quick tip
 0:10:25
0:10:25
How to think about Quaternions without your brain exploding
 0:07:07
0:07:07
Euler Angles Explained | Numerical Methods with Python 7
 0:11:02
0:11:02
Quaternions | Robotic Systems
 0:11:59
0:11:59
Flight Simulation . Quaternion Relations to Other Attitude Descriptors . Euler Angles
 0:02:09
0:02:09
How to convert Euler Angles to a quaternion ProgrammingTIL #196 3D Math 40 tutorial video screencast
 1:14:54
1:14:54
Computing Euler Angles: Tracking Attitude Using Quaternions
 0:00:15
0:00:15
Various kinds of rotations, such as euler, matrix, quaternion
 0:08:23
0:08:23
Rotations in 3D Graphics With Quaternions
 0:05:20
0:05:20
C# Quaternions in Unity! - Intermediate Scripting Tutorial
 0:00:46
0:00:46
Day in My Life as a Quantum Computing Engineer!
Комментарии