filmov
tv
Basic Intro to Quaternions for 3D Rotations

Показать описание
 0:05:49
0:05:49
Basic Intro to Quaternions for 3D Rotations
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:16:30
0:16:30
Introduction to Quaternions
 0:17:51
0:17:51
Quaternions EXPLAINED Briefly
 0:10:12
0:10:12
10 mins GameDev tips - Quaternions
 0:14:20
0:14:20
How to Use Quaternions
 0:11:35
0:11:35
How quaternions produce 3D rotation
 0:01:33
0:01:33
An introduction to Quaternions
 0:31:51
0:31:51
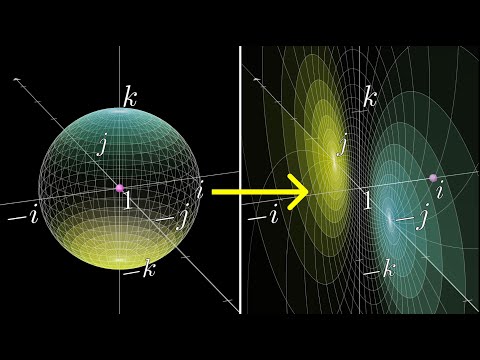
Visualizing quaternions (4d numbers) with stereographic projection
 0:00:41
0:00:41
Quaternions Are Not Four-Dimensional Objects
 0:02:59
0:02:59
Intro to quaternions part 1 - ProgrammingTIL #183 3D Math 27 tutorial video screencast
 0:12:25
0:12:25
Fantastic Quaternions - Numberphile
 0:00:10
0:00:10
Let's see how familiar you are with rotations and quaternions
 0:00:38
0:00:38
Why greatest Mathematicians are not trying to prove Riemann Hypothesis? || #short #terencetao #maths
 0:59:58
0:59:58
Math in Game Development Summit: A Visual Guide to Quaternions and Dual Quaternions
 0:10:25
0:10:25
How to think about Quaternions without your brain exploding
 0:05:20
0:05:20
C# Quaternions in Unity! - Intermediate Scripting Tutorial
 0:23:49
0:23:49
Unit Quaternions in Robotics + Great Demos | Fundamentals of Robotics | Lesson 12
 0:11:02
0:11:02
Quaternions | Robotic Systems
 0:16:48
0:16:48
Let's remove Quaternions from every 3D Engine: Intro to Rotors from Geometric Algebra
 0:09:23
0:09:23
Quaternions | Robotic Systems (OLD)
 0:02:59
0:02:59
Quaternions: Essential for Coding - Breakthrough Junior Challenge 2021
 0:14:37
0:14:37
Maths for Game Development: Quaternions
 0:52:22
0:52:22
Set Theory (Part 14b): Quaternions and 3D Rotations
Комментарии