filmov
tv
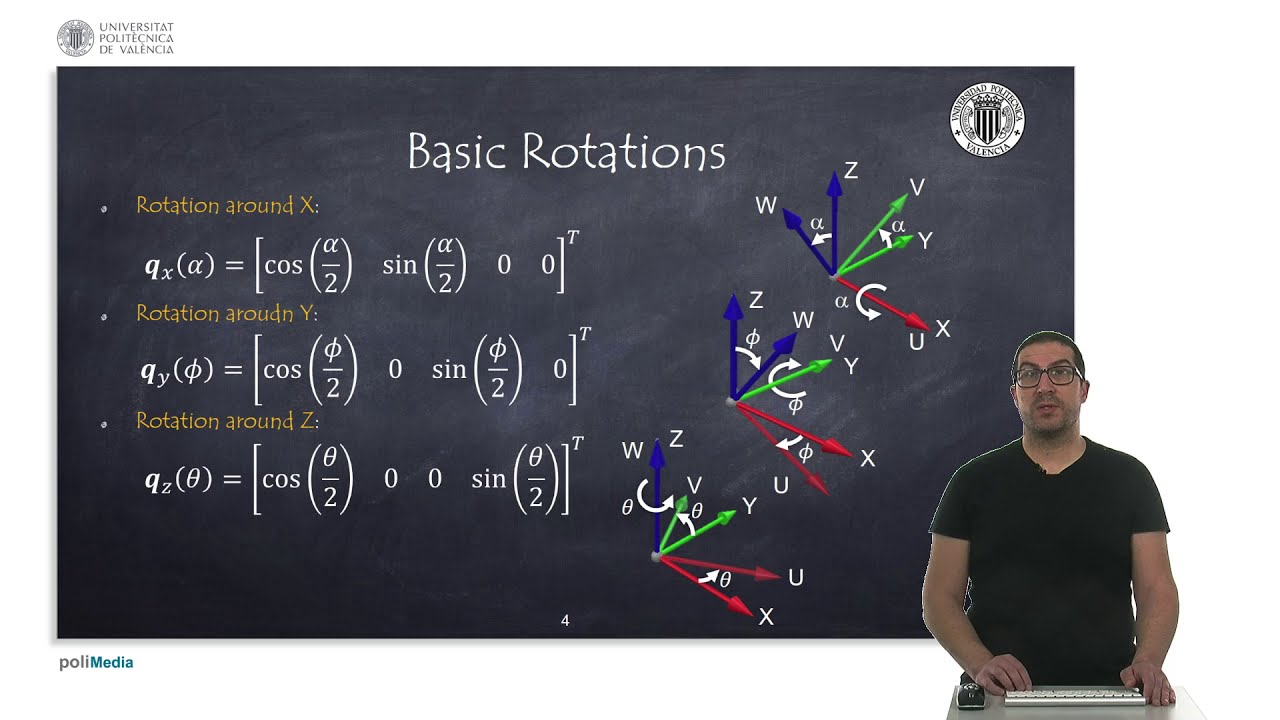
Quaternions | Robotic Systems
Показать описание
This video introduces quaternions, a representation convention for 3D orientation commonly used in robotics. Please buy me a coffee:
This video is part of a set of video tutorials used in robotic courses in Universitat Politècnica de València.
This video is part of a set of video tutorials used in robotic courses in Universitat Politècnica de València.
 0:11:02
0:11:02
Quaternions | Robotic Systems
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:09:23
0:09:23
Quaternions | Robotic Systems (OLD)
 0:14:20
0:14:20
How to Use Quaternions
 0:10:25
0:10:25
How to think about Quaternions without your brain exploding
 0:58:15
0:58:15
Complex Robotic Systems: Modeling, Control, and Planning using Dual Quaternion Algebra
 1:03:24
1:03:24
Quaternions in Robotics | ROS Developers Open Class #205
 0:00:41
0:00:41
Quaternions Are Not Four-Dimensional Objects
 0:00:34
0:00:34
Dual Quaternion Multibody Spacecraft-Mounted Robotic System Pose-Tracking Maneuver
 0:31:51
0:31:51
Visualizing quaternions (4d numbers) with stereographic projection
 0:05:49
0:05:49
Basic Intro to Quaternions for 3D Rotations
 0:08:49
0:08:49
Euler vs Quaternion - What's the difference?
 0:11:35
0:11:35
How quaternions produce 3D rotation
 0:23:49
0:23:49
Unit Quaternions in Robotics + Great Demos | Fundamentals of Robotics | Lesson 12
 0:01:00
0:01:00
Exponential stability of trajectory tracking control in the orientation space utilizing quaternions
 0:01:00
0:01:00
🛞 What is quaternion rotation? Blender quick tip
 0:00:25
0:00:25
Euler Angles and Quaternions #quaternions #opengl #programming #programação #python
 0:00:11
0:00:11
Let's see how familiar you are with rotations and quaternions
 0:35:25
0:35:25
Bruno Adorno -Complex Robotic Systems: Modeling, Control, and Planning using Dual Quaternion Algebra
 1:05:38
1:05:38
Complex Robotic Systems Modeling, Control, and Planning using Dual Quaternion Algebra
 0:10:12
0:10:12
10 mins GameDev tips - Quaternions
 0:08:08
0:08:08
Shape Rotation with quaternions
 0:00:12
0:00:12
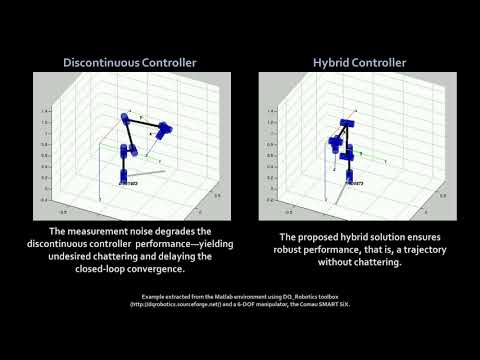
Hybrid Kinematic Control for Rigid Body Pose Stabilization using Dual Quaternions
 0:53:25
0:53:25
Bruno Vilhena Adorno-Complex Robotic Systems:Modeling,Control& Planning with Dual Quaternion Alg...
Комментарии