filmov
tv
Robotic systems. Rotation matrix. | | UPV

Показать описание
Título: Robotic systems. Rotation matrix.
Descripción automática: In this video, the presenter introduces the concept of rotation matrices and underscores their importance in representing the orientation of links within robotic systems. The aim is to explain how rotation matrices represent orientation in three-dimensional spaces. The video covers the expressions for rotation matrices in several cases, basic properties of these matrices, and the composition of rotations to achieve different orientations.
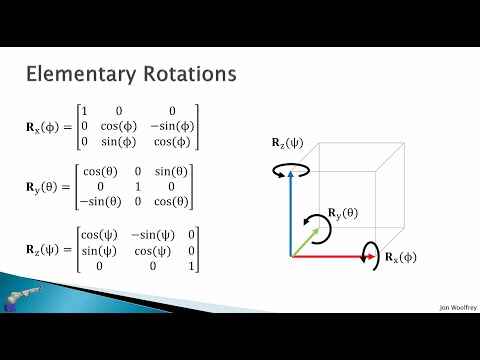
The presenter explains that a rotation matrix represents the rotation of a reference frame on an XY plane, with columns corresponding to the rotated coordinates of the original frame. Examples of 45-degree and -60-degree rotations demonstrate how matrix columns align with the transformed coordinates of vectors U and V. The video also touches on 3D rotations, which can be represented by a 3x3 matrix, and explains rotations around the X, Y, and Z axes using the right-hand rule.
Additionally discussed are the properties of rotation matrices, including the orthogonality and unit length of their rows and columns, the determinant always being one, and the inverse being equal to the transpose. This is useful for applying rotations in reverse. The process of composing rotations and the effect of order on the final orientation are highlighted, pointing out that matrix multiplication is non-commutative and thus, rotation sequences yield different outcomes.
Lastly, the video provides examples of rotations applied with respect to a fixed reference frame versus a mobile reference frame, showing how the application of basic rotation matrices changes depending on the frame of reference. The viewer is encouraged to thoroughly understand all concepts before proceeding to the next tutorial.
Autor/a: Armesto Ángel Leopoldo
#Robotics #Robots #Robot arm #Manipulator #Rotation matrix #3310 - Tecnología industrial
Descripción automática: In this video, the presenter introduces the concept of rotation matrices and underscores their importance in representing the orientation of links within robotic systems. The aim is to explain how rotation matrices represent orientation in three-dimensional spaces. The video covers the expressions for rotation matrices in several cases, basic properties of these matrices, and the composition of rotations to achieve different orientations.
The presenter explains that a rotation matrix represents the rotation of a reference frame on an XY plane, with columns corresponding to the rotated coordinates of the original frame. Examples of 45-degree and -60-degree rotations demonstrate how matrix columns align with the transformed coordinates of vectors U and V. The video also touches on 3D rotations, which can be represented by a 3x3 matrix, and explains rotations around the X, Y, and Z axes using the right-hand rule.
Additionally discussed are the properties of rotation matrices, including the orthogonality and unit length of their rows and columns, the determinant always being one, and the inverse being equal to the transpose. This is useful for applying rotations in reverse. The process of composing rotations and the effect of order on the final orientation are highlighted, pointing out that matrix multiplication is non-commutative and thus, rotation sequences yield different outcomes.
Lastly, the video provides examples of rotations applied with respect to a fixed reference frame versus a mobile reference frame, showing how the application of basic rotation matrices changes depending on the frame of reference. The viewer is encouraged to thoroughly understand all concepts before proceeding to the next tutorial.
Autor/a: Armesto Ángel Leopoldo
#Robotics #Robots #Robot arm #Manipulator #Rotation matrix #3310 - Tecnología industrial
 0:09:01
0:09:01
 0:09:01
0:09:01
 0:16:08
0:16:08
 0:10:13
0:10:13
 0:05:05
0:05:05
 0:11:02
0:11:02
 0:05:59
0:05:59
 0:22:01
0:22:01
 0:11:14
0:11:14
 0:11:22
0:11:22
 0:02:58
0:02:58
 0:09:23
0:09:23
 0:08:24
0:08:24
 0:30:46
0:30:46
 0:12:41
0:12:41
 0:08:49
0:08:49
 0:00:28
0:00:28
 0:11:03
0:11:03
 0:08:52
0:08:52
 0:04:41
0:04:41
 0:11:31
0:11:31
 0:21:20
0:21:20
 0:06:24
0:06:24
 0:05:03
0:05:03