filmov
tv
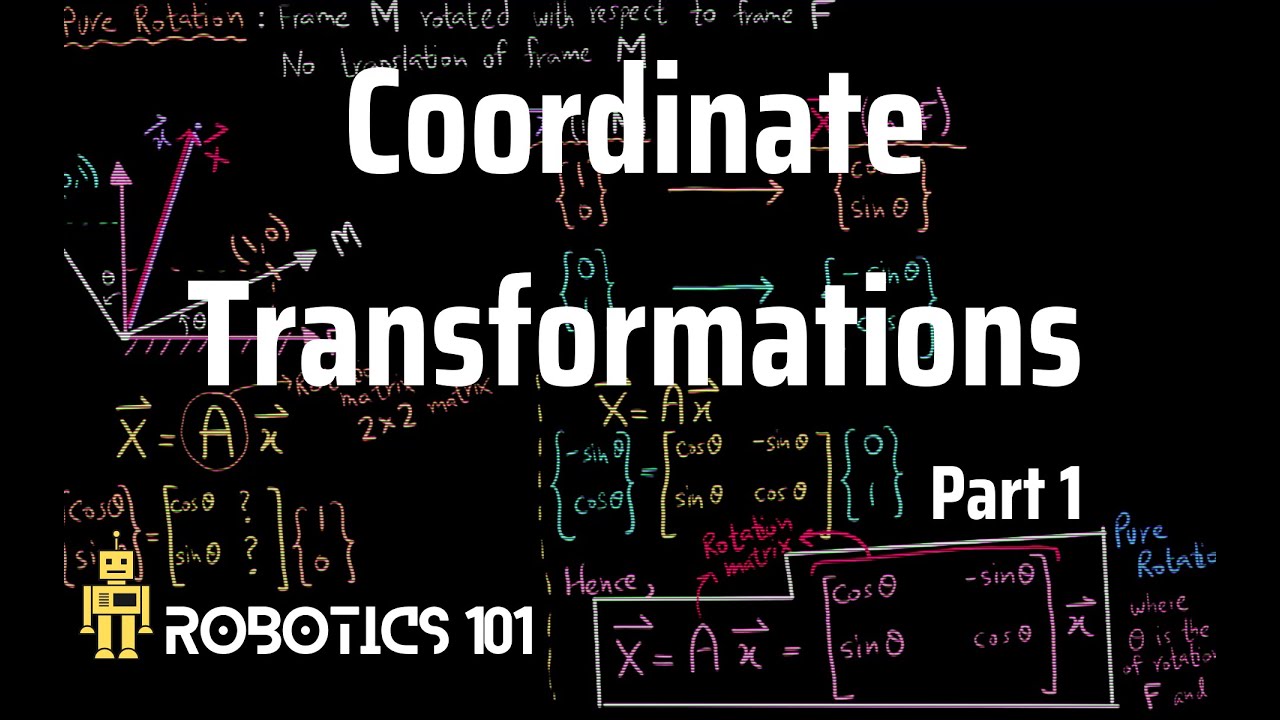
Coordinate Transformations in 2D | Mapping | Robotics 101
Показать описание
We discuss coordinate transformations in light of robotics and their three main types:
1. Pure Rotation
2. Pure Translation
3. Both Rotation & Translation combined
The mathematics behind each is discussed and I have included a few examples along the way.
🌟 Contents 🌟
00:00 Introduction
00:25 Definition of Coordinate transformations
00:51 Why do we need coordinate transformations in robotics
02:23 Types of coordinate transformations
03:04 Pure Translation
04:12 Example of pure translation
05:24 Pure Rotation
In the next couple of videos, we take it a step further and apply coordinate transformations to 2D robots to see how it enables us to change the representation of an object from a body frame to a fixed frame (and vice versa).
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts out from the very basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
1. Pure Rotation
2. Pure Translation
3. Both Rotation & Translation combined
The mathematics behind each is discussed and I have included a few examples along the way.
🌟 Contents 🌟
00:00 Introduction
00:25 Definition of Coordinate transformations
00:51 Why do we need coordinate transformations in robotics
02:23 Types of coordinate transformations
03:04 Pure Translation
04:12 Example of pure translation
05:24 Pure Rotation
In the next couple of videos, we take it a step further and apply coordinate transformations to 2D robots to see how it enables us to change the representation of an object from a body frame to a fixed frame (and vice versa).
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts out from the very basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
 0:08:52
0:08:52
Coordinate Transformations in 2D | Mapping | Robotics 101
 0:08:24
0:08:24
Rotation Matrix for Coordinate Transformation
 0:09:13
0:09:13
Coordinate Transformations in 2D (Part 3) | Mapping | Robotics 101
 0:43:51
0:43:51
Translations Reflections and Rotations - Geometric Transformations!
 0:02:11
0:02:11
Homogeneous Coordinates
 0:05:31
0:05:31
Translating Shapes On The coordinate Plane - Transformations
 0:02:59
0:02:59
Homogeneous Coordinates for 2D Transformations
 0:10:48
0:10:48
2d translation example | Transformation| Computer graphics | Lec-19 | Bhanu Priya
 0:09:56
0:09:56
3x3 Image Transformations | Image Stitching
 0:10:13
0:10:13
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
 0:10:59
0:10:59
Linear transformations and matrices | Chapter 3, Essence of linear algebra
 0:12:51
0:12:51
Change of basis | Chapter 13, Essence of linear algebra
 0:04:49
0:04:49
Coordinate Transformations in 2D (Part 2) | Mapping | Robotics 101
 0:04:46
0:04:46
Three-dimensional linear transformations | Chapter 5, Essence of linear algebra
 0:06:48
0:06:48
Transformations - Rotate 90 Degrees Around The Origin
 0:04:02
0:04:02
Transformations - Translating On The Coordinate Plane
 0:04:13
0:04:13
The Four Transformations In Maths
 0:11:48
0:11:48
Coordinate Transformations and Curvilinear Coordinates | Tensor Calculus
 0:05:05
0:05:05
Rotation matrix derivation (step-by-step prove)
 0:34:10
0:34:10
Transformation in 2D: Translation|Scaling|Rotation|Reflection|Shearing with numericals
 0:31:56
0:31:56
Video05-TA04: Natural basis vectors (definition & coordinate transformations) & some calming...
 0:01:32
0:01:32
Math Shorts Episode 4 - Reflection
 0:11:28
0:11:28
2D rotation with example | Transformation | Computer graphics | Lec-20 | Bhanu Priya
 0:03:26
0:03:26
Matrix Transformations : reflections and rotations
Комментарии