filmov
tv
2.3 Rotations in 3D

Показать описание
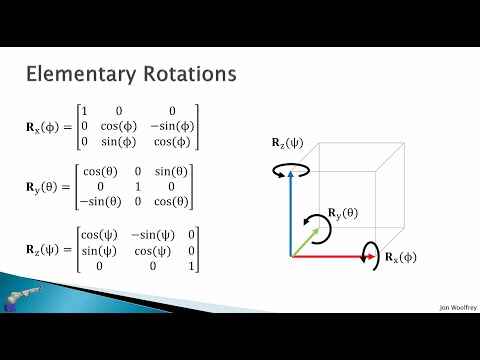
In this lecture, I extend the 2D rotation matrix of SO(2) from Lecture 2.2 to SO(3). Rotation matrices can be constructed from elementary rotations about the X, Y, and Z axes. I also cover the problem of Gimbal Lock, and how to express rotation error.
 0:11:14
0:11:14
2.3 Rotations in 3D
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:18:36
0:18:36
Rotation in Three Dimension
 0:01:33
0:01:33
Rotations (Easier Method) 90 180 270
 0:04:46
0:04:46
Three-dimensional linear transformations | Chapter 5, Essence of linear algebra
 0:12:18
0:12:18
Rotation in R3 around the x-axis | Matrix transformations | Linear Algebra | Khan Academy
 0:22:35
0:22:35
Rotation Matrix for 2D Vectors
 0:06:06
0:06:06
Describing rotation in 3d with a vector
 0:24:18
0:24:18
Godot 4 Third Person Movement Mode | Adding To My Character Controller Template
 0:00:13
0:00:13
The Aerospace Euler Angles
 0:12:56
0:12:56
Lecture 2 - 3: Homogeneous Transformations (Robotics UTEC 2018-1)
 0:01:35
0:01:35
2D Rotation
 0:05:05
0:05:05
Rotation matrix derivation (step-by-step prove)
 0:10:59
0:10:59
Linear transformations and matrices | Chapter 3, Essence of linear algebra
 0:16:48
0:16:48
Let's remove Quaternions from every 3D Engine: Intro to Rotors from Geometric Algebra
 0:04:11
0:04:11
Rotating 2D shapes in 3D | Perimeter, area, and volume | Geometry | Khan Academy
 0:02:17
0:02:17
3D VECTOR Components in 2 Minutes! - Statics
 0:09:34
0:09:34
3D rotation | Computer graphics | Lec-27 | Bhanu Priya
 0:01:02
0:01:02
Rotational Symmetry of Cube (Order 2)
 0:57:21
0:57:21
3D CS - 03 - Rotations - Overview, Rotation Matrices, Euler Angles (Wolfgang Förstner, 2020)
 0:55:07
0:55:07
Rigid Body Kinematics Introduction | Rotation Matrix Relating Frames in 3D | Direction Cosine Matrix
 0:00:30
0:00:30
Engine Speed (RPM)
 0:09:59
0:09:59
What makes planetary gearboxes so amazing?
 0:00:30
0:00:30
1:243 Gear Ratio
Комментарии