filmov
tv
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
Показать описание
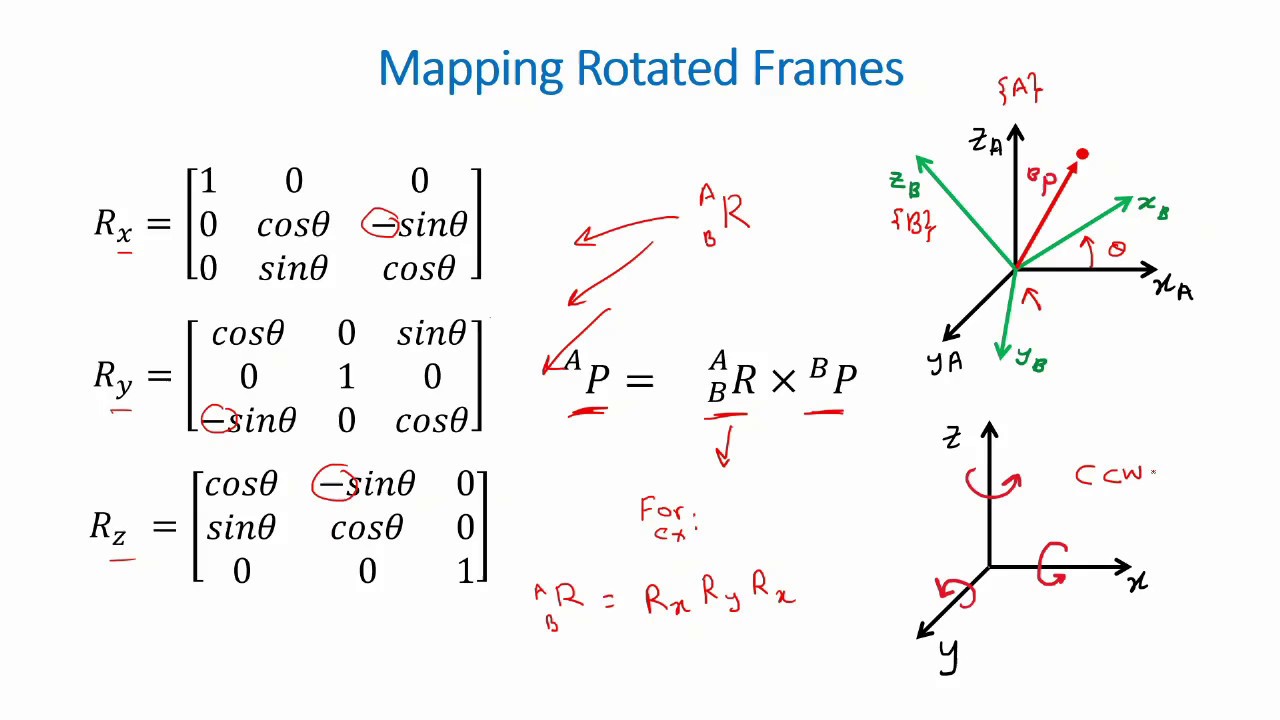
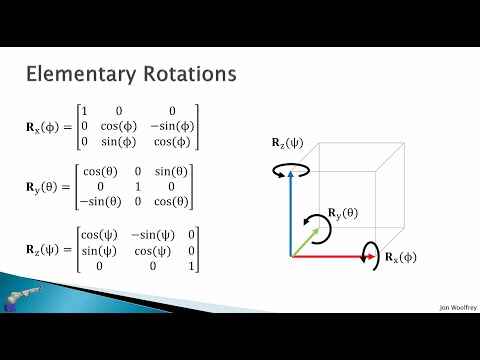
This video introduces the concept of position vectors and orientation/rotation matrices to formulate a frame and a transformation matrix. It explains how to describe a point in space relative to different frames, when they are translated and/or rotated. Finally, simple operations in describing robotic manipulators, with respect to transformation matrices are explained.
Intro music:
Subject material obtained from:
John. J. Craig, Introduction to Robotics (Mechanics and Control). Pearson Education International.
Hope this video helps.
If you have any questions, please leave a comment, and don't forget to subscribe.
Thanks everyone
Intro music:
Subject material obtained from:
John. J. Craig, Introduction to Robotics (Mechanics and Control). Pearson Education International.
Hope this video helps.
If you have any questions, please leave a comment, and don't forget to subscribe.
Thanks everyone
 0:10:13
0:10:13
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
 0:08:58
0:08:58
Spacial Descriptions and Transformations - Worked Example
 0:10:59
0:10:59
Linear transformations and matrices | Chapter 3, Essence of linear algebra
 0:51:47
0:51:47
Computation of Spatial Descriptions and Transformations using MATLAB Robotics Toolbox.
 1:15:12
1:15:12
SYSC 4206 (Surgical Robotics) - Lecture 2: Spatial descriptions and rigid transformations
 0:06:51
0:06:51
Robotics | Spatial descriptions and Transformations | 1 - exercise
 0:19:35
0:19:35
S1 - Spatial Transformations: Description of Position and Orientation of a Body
 0:39:41
0:39:41
Mapping Orientation Spatial description Rotation matrix | Robotics |
 0:09:08
0:09:08
Introduction to Homogeneous Transforms in Robotics
 0:08:24
0:08:24
Rotation Matrix for Coordinate Transformation
 0:12:56
0:12:56
Lecture 2 - 3: Homogeneous Transformations (Robotics UTEC 2018-1)
 0:21:58
0:21:58
Robotics | Lecture Notes | Spatial Descriptions & Transformations - 1
 0:16:08
0:16:08
Introduction to Rotation Matrices in Robotics
 0:22:53
0:22:53
S3 - Spatial Transformations: Homogeneous Transform II
 0:11:14
0:11:14
2.3 Rotations in 3D
 0:22:52
0:22:52
Lecture 4 - Description of position and orientation
 0:09:24
0:09:24
Linear Algebra for Computer Scientists. 14. 3D Transformation Matrices
 0:35:44
0:35:44
Spatial Descriptions of a Robot
 0:12:20
0:12:20
S6 - Spatial Transformations: Matlab Session on Effect of Rotation wrt Fixed vs Moving Frame of Ref
 0:16:42
0:16:42
S2 - Spatial Transformations: Homogeneous Transform I
 0:24:46
0:24:46
Homogeneous Transformation Matrices in Robotics | Fundamentals of Robotics | Lesson 14
 0:18:36
0:18:36
Rotation in Three Dimension
 0:04:41
0:04:41
Fixed and Euler Angle Representation for Rotation Matrices
 0:10:19
0:10:19
Compound Transformation Matrices and Inverse Transformation Matrices - Robotic Basics
Комментарии