filmov
tv
Rotation Matrices in Robotics | Fundamentals of Robotics | Lesson 8

Показать описание
🌟 Contents 🌟
💎 (00:00) Introduction
💎 (02:12) Introduction to Rotation Matrices
💎 (07:07) Special Orthogonal Group SO(3)
💎 (08:28) Properties of Rotation Matrices
💎 (10:35) Rotations commute for the planar rotations
💎 (12:44) Uses of Rotation Matrices
💎 (12:57) Use of Rotation matrices as Implicit Representations of the Orientations
💎 (17:15) Use of Rotation matrices to change the Reference Frame of a Vector or a Frame (Rotation Matrix is an Operator)
💎 (19:27) Use of Rotation matrices to rotate a Vector or a Frame (Rotation matrix is an operator)
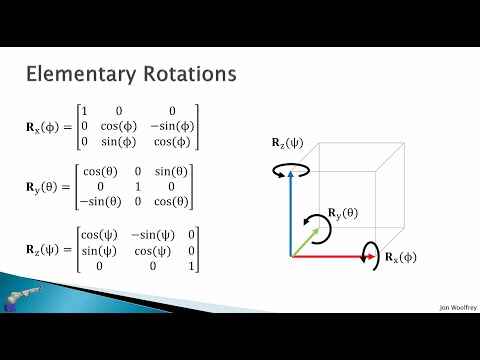
💎 (24:03) Rotation Operators about the x, y, and z axes
💎 (26:13) Demonstration: the Representation of the Orientation of the Elements in the Robot's Workspace
💎 (28:27) Demonstration: Successive Rotations of a Point about the Coordinate Axes of the Base Frame
In this lesson, we will focus on the orientation, and we will see that we can implicitly represent the orientation using powerful tools named rotation matrices, and we will understand everything about rotation matrices and their properties and various uses.
This video also has a reading version that complements the video. Our suggestion is to watch the video and then read the reading for a deeper understanding. For the reading, refer to the link below:
Be sure to also watch other lessons on Fundamentals of Robotics gathered into a playlist for your convenience as some of the lessons are prerequisites for this lesson.
Thanks for watching! We'd love to have you as a part of the Mecharithm family👇
References:
📘 Textbooks:
Modern Robotics: Mechanics, Planning, and Control by Frank Park and Kevin Lynch
A Mathematical Introduction to Robotic Manipulation by Murray, Lee, and Sastry
📃 Articles:
- Cao, C.T., Do, V.P. and Lee, B.R., 2019. A novel indirect calibration approach for robot positioning error compensation based on neural network and hand-eye vision. Applied Sciences, 9(9), p.1940.
💲 If you enjoyed this video, please consider contributing to help us with our mission of making Robotics and Mechatronics available for everyone. We sincerely thank you for your generous contribution (you can do this by the Thanks button under the video).
©️ Tutorials and learning material are proprietary to Mecharithm, but sampling is permitted with proper attribution to the main source.
#roboticsolutions #robotics #roboticsengineering #roboticslearning #roboticsschool #roboticsstudent #roboticsclass #roboticseducation #mechatronics #mechatronicsengineering #mechatronicstudent #roboticseducationcentre #robot #robots #robotech #robotdesign #rotation #rotationmatrices #orientation #configuration #visionsystem #rotationmatrixrobotics #rotationmatrixinrobotics #roboticsrotationmatrix
💎 (00:00) Introduction
💎 (02:12) Introduction to Rotation Matrices
💎 (07:07) Special Orthogonal Group SO(3)
💎 (08:28) Properties of Rotation Matrices
💎 (10:35) Rotations commute for the planar rotations
💎 (12:44) Uses of Rotation Matrices
💎 (12:57) Use of Rotation matrices as Implicit Representations of the Orientations
💎 (17:15) Use of Rotation matrices to change the Reference Frame of a Vector or a Frame (Rotation Matrix is an Operator)
💎 (19:27) Use of Rotation matrices to rotate a Vector or a Frame (Rotation matrix is an operator)
💎 (24:03) Rotation Operators about the x, y, and z axes
💎 (26:13) Demonstration: the Representation of the Orientation of the Elements in the Robot's Workspace
💎 (28:27) Demonstration: Successive Rotations of a Point about the Coordinate Axes of the Base Frame
In this lesson, we will focus on the orientation, and we will see that we can implicitly represent the orientation using powerful tools named rotation matrices, and we will understand everything about rotation matrices and their properties and various uses.
This video also has a reading version that complements the video. Our suggestion is to watch the video and then read the reading for a deeper understanding. For the reading, refer to the link below:
Be sure to also watch other lessons on Fundamentals of Robotics gathered into a playlist for your convenience as some of the lessons are prerequisites for this lesson.
Thanks for watching! We'd love to have you as a part of the Mecharithm family👇
References:
📘 Textbooks:
Modern Robotics: Mechanics, Planning, and Control by Frank Park and Kevin Lynch
A Mathematical Introduction to Robotic Manipulation by Murray, Lee, and Sastry
📃 Articles:
- Cao, C.T., Do, V.P. and Lee, B.R., 2019. A novel indirect calibration approach for robot positioning error compensation based on neural network and hand-eye vision. Applied Sciences, 9(9), p.1940.
💲 If you enjoyed this video, please consider contributing to help us with our mission of making Robotics and Mechatronics available for everyone. We sincerely thank you for your generous contribution (you can do this by the Thanks button under the video).
©️ Tutorials and learning material are proprietary to Mecharithm, but sampling is permitted with proper attribution to the main source.
#roboticsolutions #robotics #roboticsengineering #roboticslearning #roboticsschool #roboticsstudent #roboticsclass #roboticseducation #mechatronics #mechatronicsengineering #mechatronicstudent #roboticseducationcentre #robot #robots #robotech #robotdesign #rotation #rotationmatrices #orientation #configuration #visionsystem #rotationmatrixrobotics #rotationmatrixinrobotics #roboticsrotationmatrix
 0:16:08
0:16:08
Introduction to Rotation Matrices in Robotics
 0:22:01
0:22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
 0:02:54
0:02:54
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 1 of 2)
 0:30:46
0:30:46
Rotation Matrices in Robotics | Fundamentals of Robotics | Lesson 8
 0:10:13
0:10:13
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
 0:21:20
0:21:20
Correct and Clear Explanation of Rotation Matrices in Robotics - Learn Robotics Correctly
 0:08:49
0:08:49
Rotation Matrix | Coordinate Transformations | Robotics 201
 0:11:14
0:11:14
2.3 Rotations in 3D
 0:05:59
0:05:59
Quaternions and 3d rotation, explained interactively
 0:05:05
0:05:05
Rotation matrix derivation (step-by-step prove)
 0:04:14
0:04:14
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 2 of 2)
 0:09:01
0:09:01
Robotic systems. Rotation matrix. | | UPV
 0:11:22
0:11:22
Understanding the Rotation Matrix
 0:09:57
0:09:57
Lecture 1c - 4: Rotation Matrix (Robotics UTEC 2018-1)
 0:05:03
0:05:03
Rotation matrix #robotics #kinematics #animation
 0:09:08
0:09:08
Introduction to Homogeneous Transforms in Robotics
 0:06:22
0:06:22
Modern Robotics, Chapter 3.3.1: Homogeneous Transformation Matrices
 0:00:59
0:00:59
How to use a Rotation Matrix? | Animated Math in 1min
 0:04:41
0:04:41
Fixed and Euler Angle Representation for Rotation Matrices
 0:12:41
0:12:41
Easy Rotation Matrix Tutorial for Robotics and Aerospace - Derivation of X-Axis Rotation Matrix
 0:11:31
0:11:31
Easy Rotation Matrix Tutorial for Robotics and Aerospace - Derivation of Y-Axis Rotation Matrix
 0:11:45
0:11:45
2.2 Rotation Matrices
 0:00:36
0:00:36
Robotics 1 - Rotation Matrices
 0:24:33
0:24:33
Intro2Robotics Lecture 3a: Coordinate transformations, Basic Rotation Matrices
Комментарии