filmov
tv
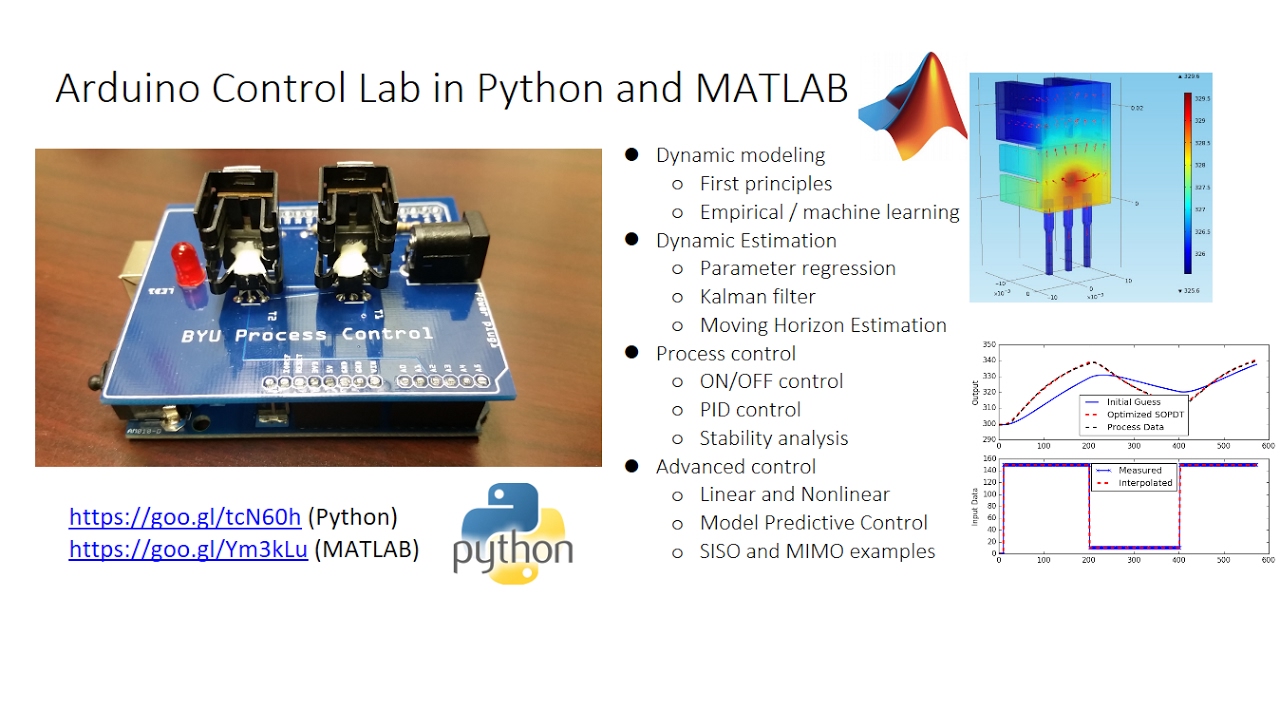
Arduino PID and Advanced Control in Python
Показать описание
This lab teaches principles of system dynamics and control. In particular, this lab reinforces:
Dynamic modeling with balance equations
The difference between manual and automatic control
Step tests to generate dynamic data
Fitting dynamic data to a First Order Plus Dead Time (FOPDT) model
Obtaining parameters for PID control from standard tuning rules
Tuning the PID controller to improve performance
 0:22:43
0:22:43
 0:09:25
0:09:25
 0:03:47
0:03:47
 0:08:43
0:08:43
 0:00:11
0:00:11
 0:18:14
0:18:14
 0:11:06
0:11:06
 0:00:29
0:00:29
 0:07:08
0:07:08
 0:00:19
0:00:19
 0:04:07
0:04:07
 0:00:16
0:00:16
 0:00:38
0:00:38
 0:05:39
0:05:39
 0:00:13
0:00:13
 0:00:16
0:00:16
 0:08:39
0:08:39
 0:00:10
0:00:10
 0:06:54
0:06:54
 0:14:18
0:14:18
 0:00:22
0:00:22
 0:06:50
0:06:50
 0:01:29
0:01:29
 0:07:32
0:07:32