filmov
tv
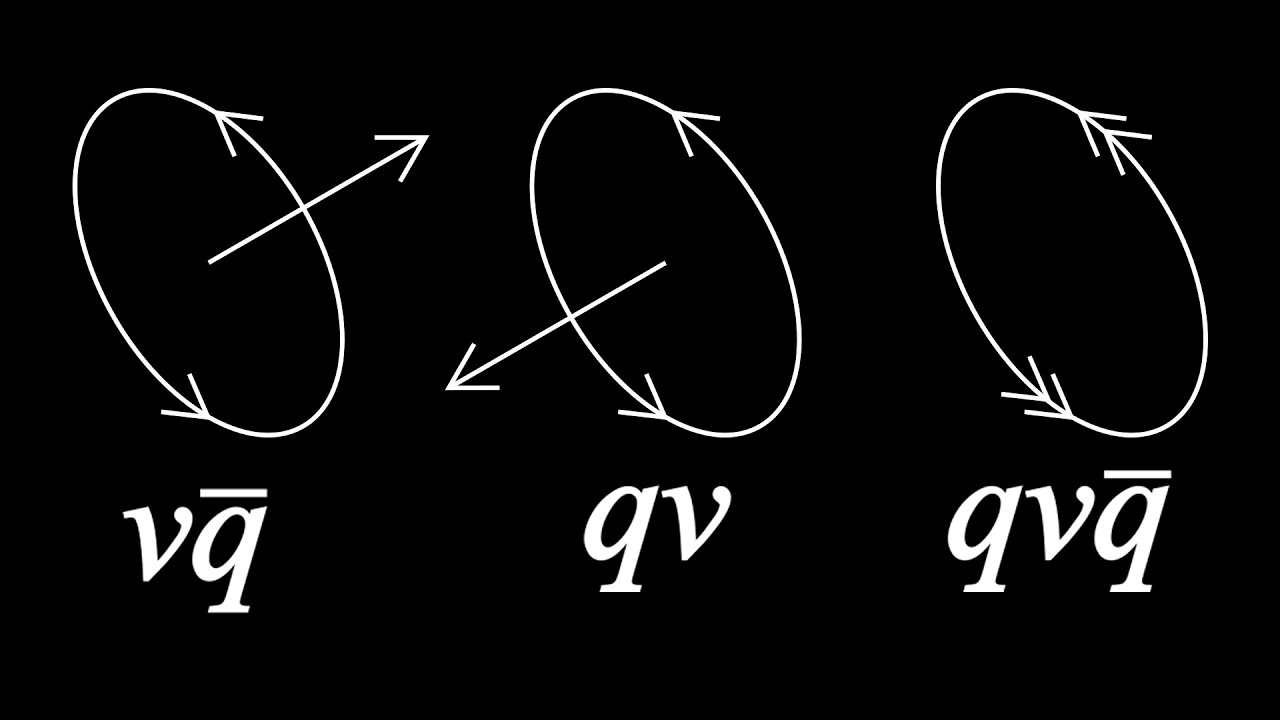
How quaternions produce 3D rotation
Показать описание
Wait a minute, aren't quaternions super confusing? After all, they live in 4D space!!! Let's try to put this confusion to rest.
Watch 3Blue1Brown's excellent video on quaternions:
Play with quaternions on 3Blue1Brown's and Ben Eater's interactive website:
Watch 3Blue1Brown's excellent video on quaternions:
Play with quaternions on 3Blue1Brown's and Ben Eater's interactive website:
 0:11:35
0:11:35
How quaternions produce 3D rotation
 0:05:59
0:05:59
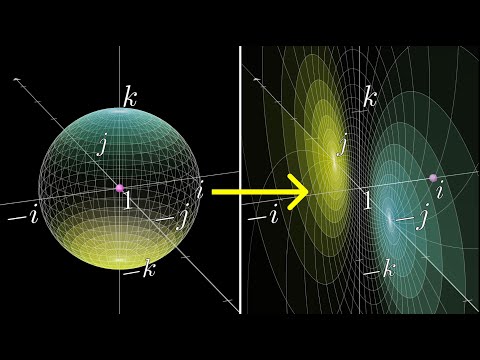
Quaternions and 3d rotation, explained interactively
 0:05:49
0:05:49
Basic Intro to Quaternions for 3D Rotations
 0:14:20
0:14:20
How to Use Quaternions
 0:08:23
0:08:23
Rotations in 3D Graphics With Quaternions
 0:10:12
0:10:12
10 mins GameDev tips - Quaternions
 0:00:10
0:00:10
Let's see how familiar you are with rotations and quaternions
 0:18:52
0:18:52
Godot's Quaternion Variant is Beautiful (and misunderstood)
 0:00:41
0:00:41
Quaternions Are Not Four-Dimensional Objects
 0:31:51
0:31:51
Visualizing quaternions (4d numbers) with stereographic projection
 0:07:14
0:07:14
Cinema 4D Quaternion Rotations
 0:03:26
0:03:26
Quaternion rotations on the 16-cell
 0:00:39
0:00:39
Quaternions. Rotation composition.
 0:01:24
0:01:24
Unity Slerp Visualized - Like lerp, but rotund
 0:24:22
0:24:22
Camera Rotation With Quaternions // OpenGL Tutorial #15
 0:09:17
0:09:17
Rotation Math Tricks - Using Unity's Quaternion Operators
 0:33:09
0:33:09
3D Rotations in General: Rodrigues Rotation Formula and Quaternion Exponentials
 0:11:14
0:11:14
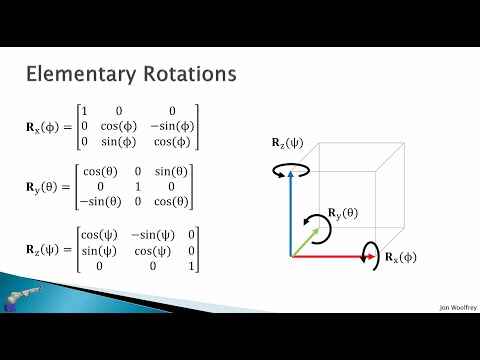
2.3 Rotations in 3D
 0:11:02
0:11:02
Quaternions | Robotic Systems
 0:23:49
0:23:49
Unit Quaternions in Robotics + Great Demos | Fundamentals of Robotics | Lesson 12
 0:16:37
0:16:37
Humane Rigging 03 - 3D Bouncy Ball 05 - Quaternion Rotation
 0:16:48
0:16:48
Let's remove Quaternions from every 3D Engine: Intro to Rotors from Geometric Algebra
 0:10:14
0:10:14
CG Forge - Quick Tips - Quaternions
 0:09:57
0:09:57
Quaternions & Matrices - CG Forge - Quick Tip
Комментарии