filmov
tv
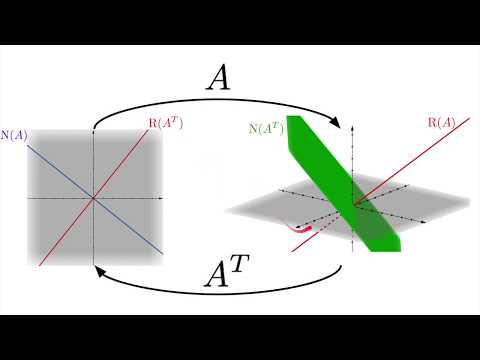
Matrix Transpose and the Four Fundamental Subspaces

Показать описание
Geogebra (Used for making plots):
Notes
[1] By "gives a sense", I mean contains vectors that can form an orthogonal basis for the components of the vectors not in the ranges.
[2] It isn’t really legal to plot R^2 and R^3 on the same set of axes like this, R^2 and R^3 are completely different spaces, but I’m showing them like this to provide some intuition and justification for all three parts of the SVD.
Notes
[1] By "gives a sense", I mean contains vectors that can form an orthogonal basis for the components of the vectors not in the ranges.
[2] It isn’t really legal to plot R^2 and R^3 on the same set of axes like this, R^2 and R^3 are completely different spaces, but I’m showing them like this to provide some intuition and justification for all three parts of the SVD.
 0:13:45
0:13:45
Matrix Transpose and the Four Fundamental Subspaces
 0:25:41
0:25:41
The deeper meaning of matrix transpose
 0:09:44
0:09:44
Transpose matrix | Lecture 4 | Matrix Algebra for Engineers
 0:13:15
0:13:15
Properties of the transpose of a matrix, linear algebra tutorial
 0:10:04
0:10:04
Matrix multiplication as composition | Chapter 4, Essence of linear algebra
 0:16:26
0:16:26
Dear linear algebra students, This is what matrices (and matrix manipulation) really look like
 0:02:07
0:02:07
How to Find the Transpose of a Matrix
 0:10:01
0:10:01
TRANSPOSE AND SPECIAL MATRICES || MADE EASY
 0:06:12
0:06:12
Matrix transpose
 0:02:03
0:02:03
How to Find the Transpose of a Matrix, 4 Examples
 0:03:34
0:03:34
Transpose of a Matrix | Don't Memorise
 0:03:39
0:03:39
16B Transpose of a Matrix (interesting Geometric Intuition that textbooks miss)
 0:11:23
0:11:23
Intro to Matrices
 0:05:44
0:05:44
Matrix Operations and Transpose
 0:03:41
0:03:41
Transpose of a matrix | Matrices | Precalculus | Khan Academy
 0:08:37
0:08:37
Transpose of a matrix | Matrix transformations | Linear Algebra | Khan Academy
 0:12:09
0:12:09
Inverse matrices, column space and null space | Chapter 7, Essence of linear algebra
 0:05:39
0:05:39
Matrix Multiplication with a Transpose (Example)
 0:07:08
0:07:08
Linear Algebra - Matrix Operations
 0:04:12
0:04:12
Chapter 04.04: Lesson: Transpose of a Matrix
 0:03:06
0:03:06
Linear Algebra - Matrix Transpose
 0:11:29
0:11:29
How To Find The Determinant of a 4x4 Matrix
 0:02:12
0:02:12
Why transpose a matrix? Part 4: unitary matrices, matrices that preserve the length of a vector.
 0:08:05
0:08:05
Inverse, Transpose, and Elementary matrices | Linear Algebra | Lecture 5
Комментарии