filmov
tv
Manual and Automatic PID Tuning Methods | Understanding PID Control, Part 6
Показать описание
The previous video showed three different approaches to developing a mathematical model of your physical system.
Now that we have this model, we can use it to tune a PID controller that will work to control the physical system.
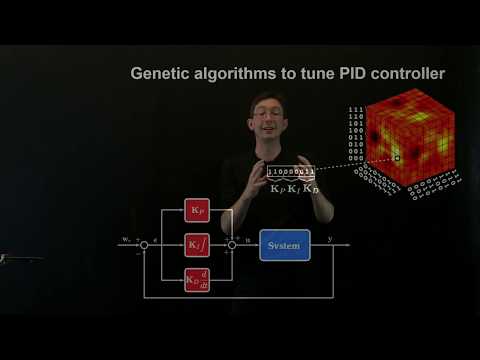
PID tuning can be thought of in two ways: Adjusting the three path gains (Kp, Ki, and Kd), or placing two moveable zeros and adjusting the loop gain to get the desired response. This video shows how thinking of PID tuning using moveable zeros allows you to approach the problem with loop shaping and pole placement methods. These methods provide a more systematic approach over the brute force method of guessing gain values and checking the response.
In addition to manually tuning a controller, this video introduces how automatic tuning can be a way to quickly get a controller design to meet the system requirements.
Related Resources:
-------------------------------------------------------------------------------------------------------------------------------------
© 2018 The MathWorks, Inc. MATLAB and Simulink are registered
trademarks of The MathWorks, Inc.
Now that we have this model, we can use it to tune a PID controller that will work to control the physical system.
PID tuning can be thought of in two ways: Adjusting the three path gains (Kp, Ki, and Kd), or placing two moveable zeros and adjusting the loop gain to get the desired response. This video shows how thinking of PID tuning using moveable zeros allows you to approach the problem with loop shaping and pole placement methods. These methods provide a more systematic approach over the brute force method of guessing gain values and checking the response.
In addition to manually tuning a controller, this video introduces how automatic tuning can be a way to quickly get a controller design to meet the system requirements.
Related Resources:
-------------------------------------------------------------------------------------------------------------------------------------
© 2018 The MathWorks, Inc. MATLAB and Simulink are registered
trademarks of The MathWorks, Inc.
 0:13:31
0:13:31
Manual and Automatic PID Tuning Methods | Understanding PID Control, Part 6
 0:08:43
0:08:43
How to Tune a PID Controller
 0:18:14
0:18:14
How to Tune a PID Controller
 0:00:16
0:00:16
Python PID Tuning: Method 4 - AutoTuner with Adaptive Control
 0:06:01
0:06:01
How to Automatically Tune PID Controllers
 0:06:51
0:06:51
PID MANUAL TUNING
 0:13:13
0:13:13
PID Balance+Ball | full explanation & tuning
 0:06:19
0:06:19
PID Tuning: The Ziegler Nichols Method Explained
 0:14:15
0:14:15
TIA Portal: PID Compact - (Auto-)Tuning a PID Controller!
 0:06:53
0:06:53
TUNING PID CNTLR | STEP RESPONSE | PHYSICAL SYSTEM DC MOTOR EXAMPLE
 0:09:56
0:09:56
How to Use Temperature Controller | PID Controller with SSR | Temperature ON OFF Controller
 0:08:41
0:08:41
Do-more Manual Training PID Temperature Part 5B from AutomationDirect
 0:07:33
0:07:33
What are PID Tuning Parameters?
 0:00:40
0:00:40
How to tune PID Controller
 0:01:48
0:01:48
Automatic PID tuning of Honeywell DC1040 Controller
 0:01:29
0:01:29
EFI Advanced: PID Tuning Explained
 0:16:18
0:16:18
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
 0:06:34
0:06:34
Do-more Manual Training PID Temperature Part 5A from AutomationDirect
 0:00:14
0:00:14
PID Adaptive Auto Tuner - ControlLogix PID Auto Tuning with Adaptive Control
 0:02:36
0:02:36
How to Tune PID values for Self Balacing Bot
 0:01:32
0:01:32
Simulation after PID controller manual tuning
 0:13:07
0:13:07
PIDs Simplified
 0:11:47
0:11:47
How To Tune PID Controller in MATLAB SIMULINK ? | Dr. J. A. Laghari
 0:09:44
0:09:44
pid controller pid tuning tutorial instrumentation and control engineering|| industrial automation
Комментарии