filmov
tv
PID Tuning: The Ziegler Nichols Method Explained

Показать описание
In this short tutorial I will take you through the two Ziegler-Nichols tuning methods. This will let you tune the derivative, proportional and integral gains on your P, PI or PID controller. Thankfully these methods are extremely simple to understand and implement.

PID Tuning: The Ziegler Nichols Method Explained

Ziegler Nichols PID Tuning Method Using Simulink
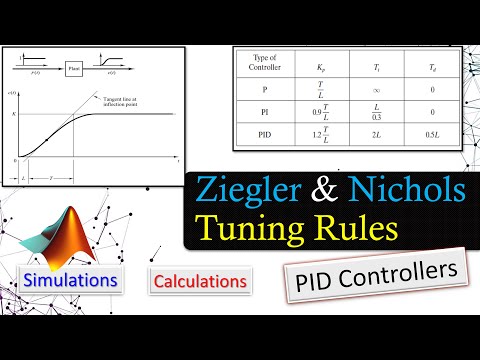
Ziegler & Nichols Tuning Rules 📉 PID Controller Design Examples! 💡

Designing a PID Controller Using the Ziegler-Nichols Method

PID Tuning - Ziegler-Nichols For Closed Loop

Clear Explanation of Ziegler-Nichols Method for PID Controller Tuning - With/without Plant Model

Ziegler–Nichols Tuning Method for PID Controller | With Solved Numerical using SCILAB XCOS Module
How to Tune a PID Controller

PID Tuning dengan Ziegler-Nichols (Seri PID Controller part2)
How to Tune a PID Controller

ZIEGLER -NICHOL PID TUNING

A PID Tuning Guide | Understanding PID Control, Part 4

Mastering Control Loop Tuning with Ziegler-Nichols Method | Ultimate Guide to PID Tuning

PID Controller: Ziegler-Nichols Tuning Parameters

PID tuning using Ziegler-Nichols tuning method with problem

Ziegler-Nichols Tune (Closed Loop) - Fisher Wizard

Tuning a PID controller with Ziegler Nichols method

Empirical PID gain tuning (Kevin Lynch)

Continuous Cycling Method (Ziegler-Nichols Method)

TUNING WITH ZIEGLER NICHOLS METHOD FOR PID CONTROLLER

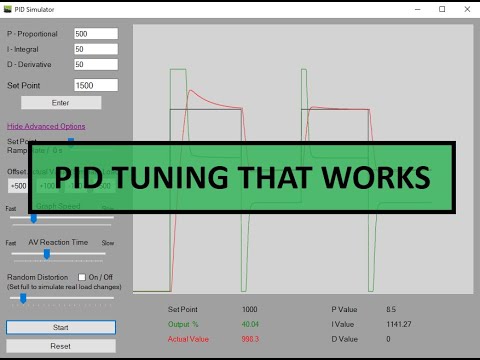
⚡️ Tuning a PID Controller Using the Ziegler-Nichols Method | MATLAB code available

L72 Ziegler-Nichol's open loop step response method of PID tuning

PID Controller Tuning in HYSYS | The Ziegler Nichols Method Explained

PID Controller Design with Matlab Simulink(PID Controller Tuning using Ziegler - Nichols Method)
Комментарии