filmov
tv
Introduction to Proportional Integral (PI) Control
Показать описание
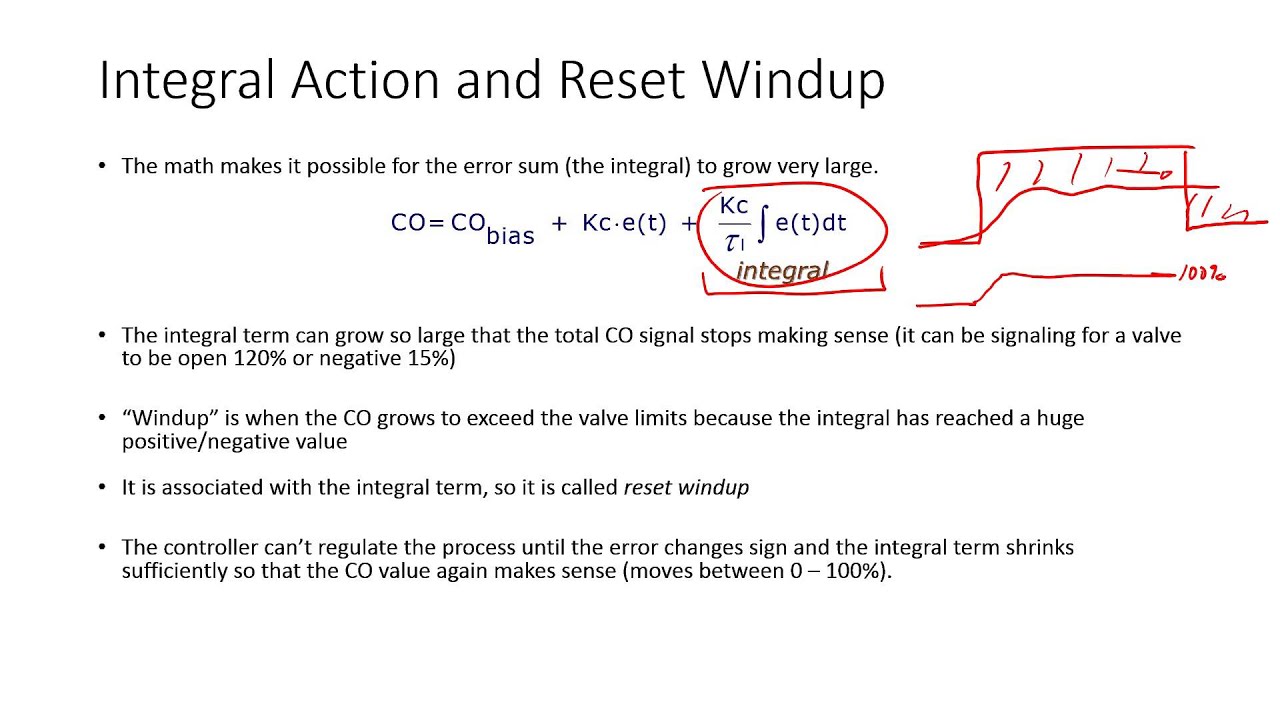
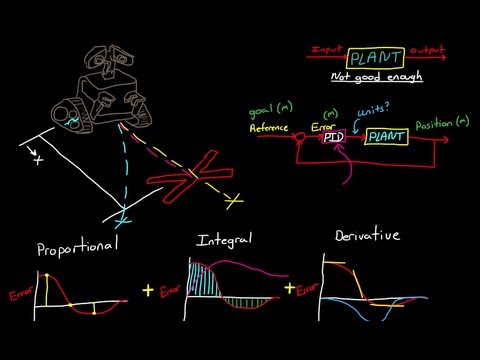
Proportional Integral (PI) controllers are the most popular industrial applications of PID controllers. These controllers have no derivative component and typically have only 2 tuning parameters. Those tuning parameters are terms that enhance either the term that is proportional to the controller error or else the term that is proportional to the integral of the error.
 0:14:48
0:14:48
Introduction to Proportional Integral (PI) Control
 0:09:25
0:09:25
PID Controller Explained
 0:07:44
0:07:44
PID Control - A brief introduction
 0:10:53
0:10:53
Proportional Integral PI Controller
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:05:39
0:05:39
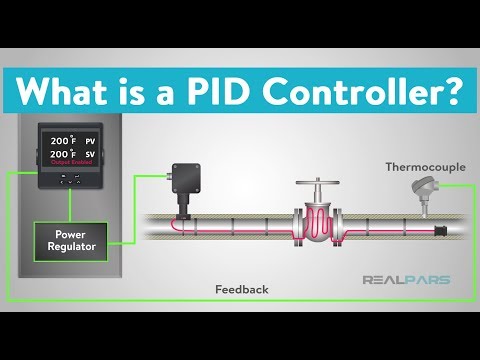
What is a PID Controller?
 0:49:18
0:49:18
Introduction to PID Control
 0:00:46
0:00:46
PID Control: The Basics #shorts #thecircuithelper
 0:53:44
0:53:44
VLSI INTRODUCTION CLASS
 0:13:07
0:13:07
PIDs Simplified
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:13:52
0:13:52
Proportional Integral (PI) controller and its limitations
 0:08:43
0:08:43
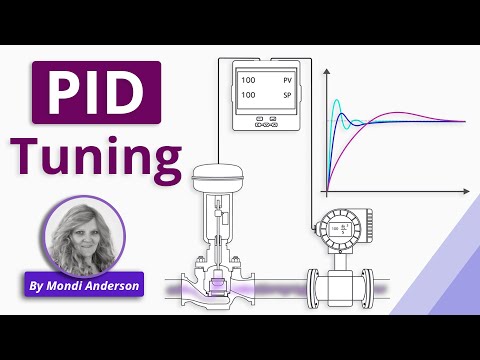
How to Tune a PID Controller
 0:23:17
0:23:17
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) control
 0:06:22
0:06:22
Design of Proportional Integral ( PI ) Controller | Simplified Control Systems EC 409 KTU S7
 0:02:42
0:02:42
P, PI, and PD variants of PID control (Kevin Lynch)
 0:11:36
0:11:36
P, PI, PD, and PID Controllers: A Comparative Analysis in Control System Engineering
 0:05:35
0:05:35
How a PI Controller works inside a VFD Speed Control system
 0:11:28
0:11:28
pi pd pid controllers
 0:07:25
0:07:25
Intro To Proportional Control
 0:05:53
0:05:53
pid controller | instrumentation | proportional integral derivative controller
 0:15:42
0:15:42
Effect Proportional Integral PI Controller
 0:07:44
0:07:44
PID Control (Proportional -- Integral -- Derivative) A brief introduction
Комментарии