filmov
tv
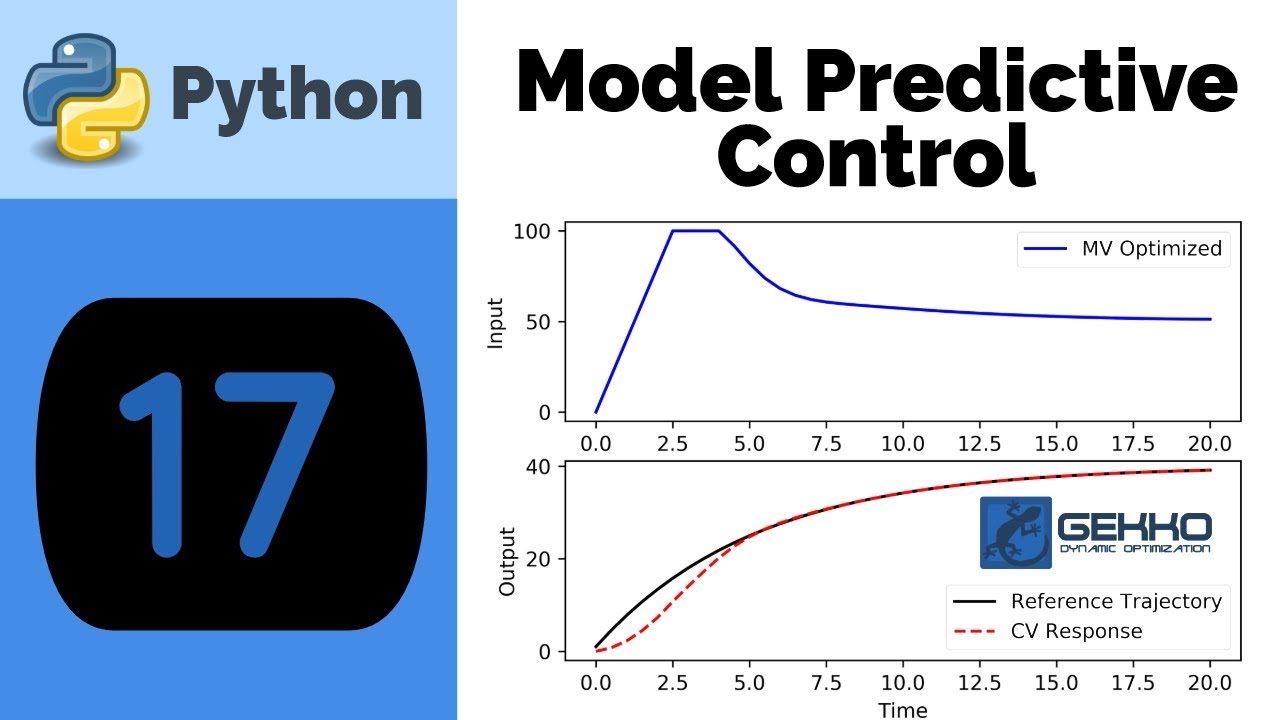
Model Predictive Control with Python GEKKO
Показать описание
Model Predictive Control uses a mathematical description of a process to project the effect of Manipulated Variables (MVs) into the future and optimize a desired outcome. This example problem shows how to implement a simplified MPC for velocity regulation (cruise control) of a vehicle. An MV, accelerator pedal, is adjusted every 0.5 seconds over a time horizon of 20 seconds. The objective is to maintain the velocity of the vehicle at 40 meters per second with a reference trajectory to avoid excessive acceleration.
 0:47:27
0:47:27
Model Predictive Control from Scratch: Derivation and Python Implementation-Optimal Control Tutorial
 0:31:52
0:31:52
Model Predictive Control in Python
 0:12:13
0:12:13
Model Predictive Control
 0:11:37
0:11:37
Understanding Model Predictive Control (MPC) for Beginners (Python Implementation)
 0:12:01
0:12:01
Model Predictive Control with Python GEKKO
 0:27:25
0:27:25
A Model Predictive Control Design Tool with Python - Full code explanation
 0:14:40
0:14:40
Nonlinear Model Predictive Control in Python
 0:00:34
0:00:34
Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles
 0:10:33
0:10:33
PID vs. Other Control Methods: What's the Best Choice
 0:10:20
0:10:20
Model Predictive Control with Binary Variables
 0:14:41
0:14:41
Pendulum Model Predictive Control with MATLAB and Python
 0:12:53
0:12:53
Model Predictive Control in MATLAB and Python
 0:02:39
0:02:39
Learning-based Model Predictive Control for Autonomous Racing
 0:00:26
0:00:26
Unitree A1 walking using model predictive control (MPC) in PyBullet
 0:08:53
0:08:53
Introduction to Model Predictive Control
 0:05:03
0:05:03
All you need to know about model predictive control for buildings
 0:31:32
0:31:32
Model Predictive Control | Reinforcement Learning (INF8953DE) | Lecture - 10 | Part - 1
 0:00:18
0:00:18
Model Predictive Control | C++ Python Extension | ACADO Toolkit
 0:15:05
0:15:05
Model Predictive Control
 0:00:15
0:00:15
Microgrid Frequency Stabilization Using Model Predictive Controller
 0:00:15
0:00:15
Q learning based traffic lights control python project
 0:00:35
0:00:35
MPC for Motion Control of Autonomous Vehicles
 0:00:15
0:00:15
FUZZY LOGIC BASED TRAFFIC LIGHT CONTROL PYTHON ARTIFICIAL INTELLIGENCE
 0:14:20
0:14:20
Process Dynamics and Control Course with Python
Комментарии