filmov
tv
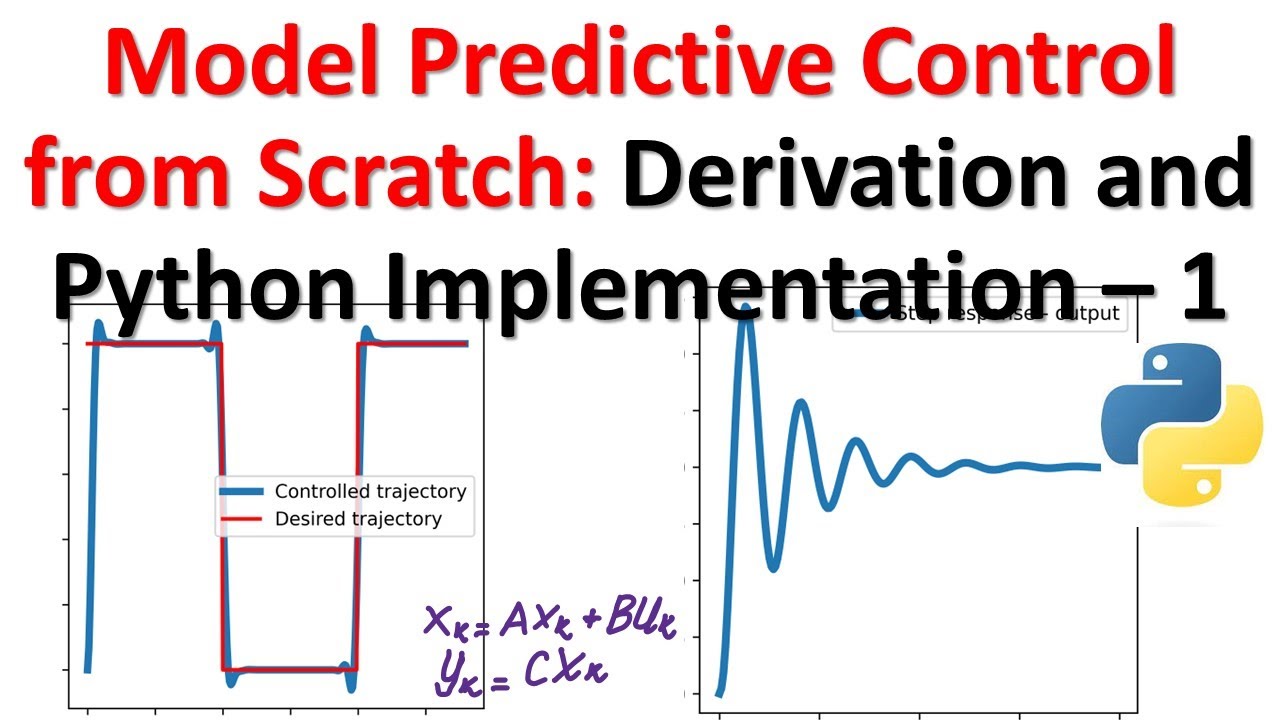
Model Predictive Control from Scratch: Derivation and Python Implementation-Optimal Control Tutorial
Показать описание
#controltheory #mechatronics #systemidentification #machinelearning #datascience #recurrentneuralnetworks #timeseries #timeseriesanalysis #signalprocessing #dynamics #mechanics #statics #mechanicalengineering #controltheory #mechatronics #robotics
If you need help with your professional engineering problem, or you need to develop new skills in the fields of control, signal processing, embedded systems, programming, optimization, machine learning, robotics, etc., we are here to help. We provide engineering services, as well as tutoring and skill development services. We have significant industry, research, and university-level teaching experience. Describe your problem and we will send you a quote for our services.
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
In this control engineering, system identification, and control theory tutorial, we explain:
1) How to derive a model predictive control algorithm from scratch.
2) How to implement the model predictive control algorithm in Python from scratch.
Starting from a state space model, we formulate an optimization problem and explain how to compute the closed form of the model predictive control solution.
The GitHub page with all the codes is given here:
The website tutorial is given here:
The MPC algorithm implementation in C++:
The main challenge was how to make a tutorial that was easy for beginners without going immediately into nonlinear and complex optimization worlds, where students immediately get lost and immediately give up on studying MPC. This comment also applies to modern control theory. A number of control scientists publishing papers in Automatica/IEEE TAC simply do not put effort into explaining things such that everyone can understand the basic concepts. There is a trend to make the control theory as complex as possible and as a pure math discipline. I think that was not the vision of the founders of control theory, who were actually engineers solving real-life problems. In fact, control theory is super applicable and relatively easy. The only issue is that one has to conquer math to be able to apply it. Consequently, I start with the MPC formulation for linear systems and I try to stick as much as possible to basic linear algebra.
We explain how to formulate a least-squares cost function, and how to minimize it. The solution can be expressed in a closed form as a solution of a weighted least-squares problem. The input constraints can be implicitly handled by properly selecting weighting matrices. We then explain how to implement this algorithm in Python from scratch and in a disciplined and clean manner (by using Python classes). We test the algorithm on a classical system consisting of two objects connected by springs and dampers. In the second part of this tutorial series, we will consider constrained linear systems. In the third part, we will consider nonlinear smooth systems (the most general formulation). After we complete the Python model predictive control tutorials, we will start a new tutorial series on how to implement the algorithm in C++ by using the Eigen Library.
If you need help with your professional engineering problem, or you need to develop new skills in the fields of control, signal processing, embedded systems, programming, optimization, machine learning, robotics, etc., we are here to help. We provide engineering services, as well as tutoring and skill development services. We have significant industry, research, and university-level teaching experience. Describe your problem and we will send you a quote for our services.
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
In this control engineering, system identification, and control theory tutorial, we explain:
1) How to derive a model predictive control algorithm from scratch.
2) How to implement the model predictive control algorithm in Python from scratch.
Starting from a state space model, we formulate an optimization problem and explain how to compute the closed form of the model predictive control solution.
The GitHub page with all the codes is given here:
The website tutorial is given here:
The MPC algorithm implementation in C++:
The main challenge was how to make a tutorial that was easy for beginners without going immediately into nonlinear and complex optimization worlds, where students immediately get lost and immediately give up on studying MPC. This comment also applies to modern control theory. A number of control scientists publishing papers in Automatica/IEEE TAC simply do not put effort into explaining things such that everyone can understand the basic concepts. There is a trend to make the control theory as complex as possible and as a pure math discipline. I think that was not the vision of the founders of control theory, who were actually engineers solving real-life problems. In fact, control theory is super applicable and relatively easy. The only issue is that one has to conquer math to be able to apply it. Consequently, I start with the MPC formulation for linear systems and I try to stick as much as possible to basic linear algebra.
We explain how to formulate a least-squares cost function, and how to minimize it. The solution can be expressed in a closed form as a solution of a weighted least-squares problem. The input constraints can be implicitly handled by properly selecting weighting matrices. We then explain how to implement this algorithm in Python from scratch and in a disciplined and clean manner (by using Python classes). We test the algorithm on a classical system consisting of two objects connected by springs and dampers. In the second part of this tutorial series, we will consider constrained linear systems. In the third part, we will consider nonlinear smooth systems (the most general formulation). After we complete the Python model predictive control tutorials, we will start a new tutorial series on how to implement the algorithm in C++ by using the Eigen Library.
 0:47:27
0:47:27
Model Predictive Control from Scratch: Derivation and Python Implementation-Optimal Control Tutorial
 0:12:13
0:12:13
Model Predictive Control
 0:55:09
0:55:09
Model Predictive Control (MPC) from Scratch - Derivation and C++ Implementation Using Eigen Library
 1:09:17
1:09:17
Nonlinear Model Predictive Control (MPC) Implementation in MATLAB from Scratch - Part 1
 0:10:33
0:10:33
PID vs. Other Control Methods: What's the Best Choice
 0:04:51
0:04:51
Why Use Model Predictive Control? | Understanding MPC, Part 1
 0:42:18
0:42:18
Model Predictive Control - Part 1: Introduction to MPC (Lasse Peters)
 0:08:53
0:08:53
Introduction to Model Predictive Control
 0:03:31
0:03:31
CL692 2x S132 Overview of Model Predictive Control IIT Bombay
 0:01:40
0:01:40
ML/DO 8: Linear Model Predictive Control
 0:58:26
0:58:26
MPC from Basics to Learning-based Design (1/2)
 0:03:00
0:03:00
Cooperative distributed model predictive control for embedded systems
 0:03:00
0:03:00
Actor-Critic Model Predictive Control (ICRA 2024)
 0:01:27
0:01:27
Real-time Implementation of Randomized Model Predictive Control for Autonomous Driving
 0:05:34
0:05:34
Model Predictive Control in ADAS
 0:01:44
0:01:44
Discrete Time Model Predictive Control for Humanoid Walking with Step Adjustment
 0:05:03
0:05:03
All you need to know about model predictive control for buildings
 0:02:11
0:02:11
Nonlinear Model Predictive Control on SE(3) for Quadrotor Aggressive Maneuvers
 0:11:37
0:11:37
Understanding Model Predictive Control (MPC) for Beginners (Python Implementation)
 0:20:50
0:20:50
Introduction to Model Predictive Control
 0:00:20
0:00:20
Adapting Atlas The Power of Model Predictive Controller in Robotics
 0:00:57
0:00:57
MPC(Model Predictive Control)
 0:10:20
0:10:20
Model Predictive Control with Binary Variables
 0:09:53
0:09:53
Accelerating Model Predictive Control With Machine Learning | Avinash Subramanian | JuliaCon 2023
Комментарии