filmov
tv
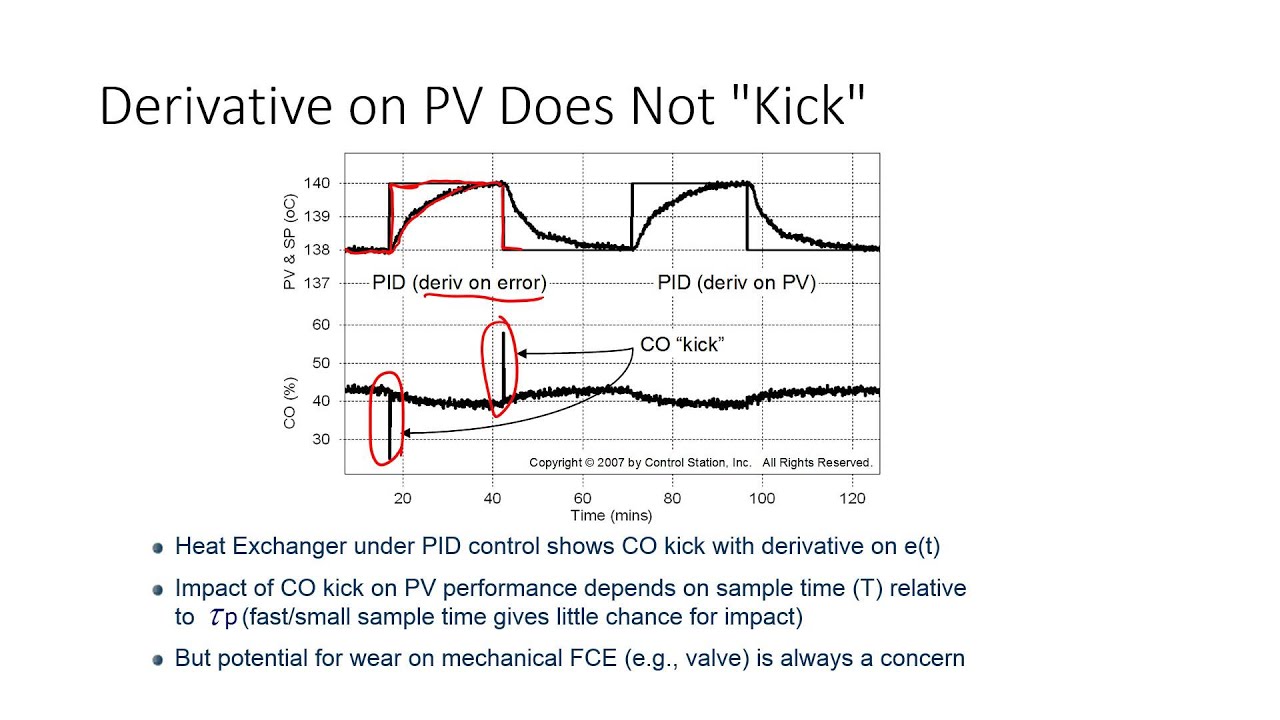
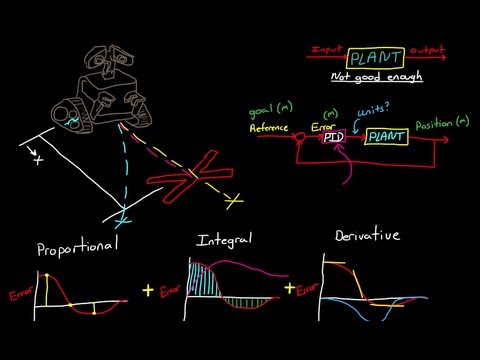
PID Control: Derivative Action
Показать описание
Proportional, Integral, Derivative (PID) controllers are a common Single Input, Single Output (SISO) method to regulate a process. This discussion delves into the derivative term in additional detail.
 0:13:00
0:13:00
PID Control: Derivative Action
 0:09:25
0:09:25
PID Controller Explained
 0:04:26
0:04:26
What is a PID Controller | Proportional Band | Integral Action | Derivative Action
 0:19:07
0:19:07
Derivative action and PID controller
 0:05:39
0:05:39
What is a PID Controller?
 0:08:43
0:08:43
How to Tune a PID Controller
 0:12:31
0:12:31
PID Controls | Ramesh Subramanian | Tribute to Late Mr. VRV | Teachers Day Special | HIMT
 0:07:44
0:07:44
PID Control - A brief introduction
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:41:19
0:41:19
PID controller design - considerations and methods
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:30:56
0:30:56
Proportional–Integral–Derivative Controller (PID controller)
 0:01:19
0:01:19
Derivative Controller Action - PID Controller Simulation
 0:11:17
0:11:17
Proportional Integral Derivative PID Controller
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:06:52
0:06:52
PID Controller in action demonstration
 0:04:24
0:04:24
Derivative Action of PID Control System, Anticipatory Control, and P+I+D, Industrial Process Control
 0:05:58
0:05:58
Types of Proportional Control
 0:07:35
0:07:35
Principles of PID Controllers
 0:22:46
0:22:46
06 5 PID Filter Implementation
 0:13:07
0:13:07
PIDs Simplified
 0:00:53
0:00:53
Learn about #PID control system and its components: Proportional, Integral, and Derivative. #shorts
 0:10:44
0:10:44
Anti-windup for PID control | Understanding PID Control, Part 2
Комментарии