filmov
tv
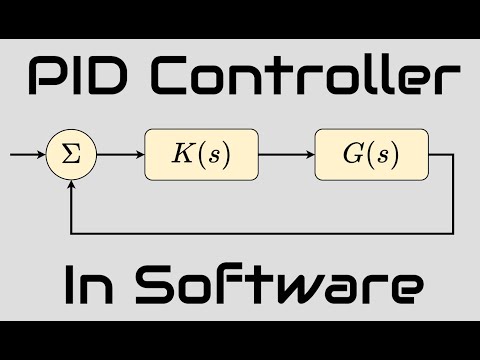
PID Controller Implementation in Software - Phil's Lab #6

Показать описание
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
[NOTE] Something I forgot to mention in the video! Note on 'derivative-on-measurement': Since the 'error signal' effectively going into the differentiator does not depend on the setpoint: e[n] = 0 - measurement, and therefore (e[n] - e[n - 1]) = (0 - measurement) - (0 - prevMeasurement) = -Kd * (measurement - prevMeasurement). Note the minus sign compared to derivative-on-error!
I've made the change in the Git repo - before you would have had to use a negative Kd gain to get the same result. Now you can, as normal with derivative-on-error, use a positive Kd gain as usual.
Additional note: The derivative low-pass filter can be controlled by the constant 'tau', which is the time constant of the filter (-3dB frequency in Hz, fc = 1 / (2*pi*tau)). A larger value of tau means the signal is filtered more heavily. As tau approaches zero, the differentiator approaches a 'pure differentiator' with no filtering.
[TIMESTAMPS]
00:00 Introduction
00:39 Control system basics
02:40 PID representation in continuous domain
04:57 Converting from the continuous to the discrete domain
06:11 PID controller difference equation
07:35 Practical considerations
10:48 Basic software structure
11:53 Implementation in C
18:46 Example: Flight simulator using PID controller code
ID: QIBvbJtYjWuHiTG0uCoK
 0:20:06
0:20:06
PID Controller Implementation in Software - Phil's Lab #6
 0:29:51
0:29:51
Arduino PID Controller - From Scratch!
 0:09:25
0:09:25
PID Controller Explained
 0:04:42
0:04:42
Controller - PID implementation
 0:18:58
0:18:58
Controlling a spaceship with your code: a simple PID controller from the ground up in python
 0:12:49
0:12:49
PI Controller Software implementation for any microcontroller using C
 0:20:00
0:20:00
7. Discrete PID control
 0:02:58
0:02:58
Hardware Demo of a Digital PID Controller
 0:18:15
0:18:15
Implementing the PID Controller in Software
 0:01:05
0:01:05
Hardware In 60 Seconds: PID Control
 0:10:52
0:10:52
STM32 motor control: PID theory and implementation
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:00:46
0:00:46
PID Control: The Basics #shorts #thecircuithelper
 2:13:00
2:13:00
Practical Implementation Issues with a PID Controller
 0:23:13
0:23:13
Simulink Control Systems and PID, Matlab R2020b
 0:00:35
0:00:35
PID controller implementation in Quanser pendulum- part 1
 0:00:12
0:00:12
Implementation of PID controller (ARDUINO)
 0:11:09
0:11:09
Mark 01 - Differential Robot #4 : Odometry and PID Controller
 0:03:19
0:03:19
PID Controller Implementation
 0:16:05
0:16:05
PID Controllers in Unity3D
 0:13:45
0:13:45
MatLab: PID Example
 0:18:45
0:18:45
Arduino PID Controller - Demo with Source Code!
 0:14:07
0:14:07
PID controller implementation on FreeRTOS and NETPIE 2020
 0:11:21
0:11:21
PID Control in Python
Комментарии