filmov
tv
PID Control Overview

Показать описание
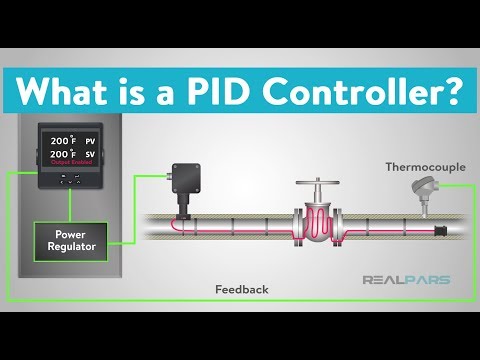
A PID (Proportional-Integral-Derivative) controller is a control loop feedback mechanism widely used in industrial control systems and other applications requiring continuously modulated control. It is a type of control system that uses feedback to continuously adjust the output of a process or system to match a desired setpoint. PID controllers are widely used in a variety of applications, including temperature control, flow control, and motor control, due to the PID ability to provide stable and accurate control with relatively simple implementation.
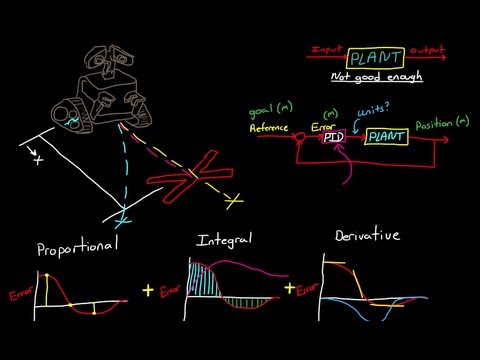
A PID (Proportional Integral Derivative) controller consists of three components that are adjusted based on the difference between a set point (SP) and a measured process variable (PV).
The output of a PID controller (u(t)) is calculated using the sum of the Proportional, Integral, and Derivative terms where KP, KI, and KD are constants that can be adjusted to fine-tune the performance of the controller.
Proportional (P) control: This component adjusts the output of the process based on the current error between the setpoint and the process variable (PV). The larger the error, the larger the correction applied.
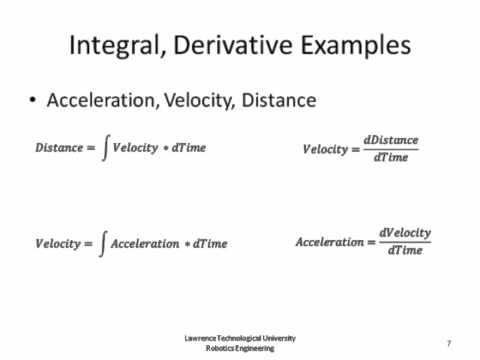
Integral (I) control: This component adjusts the output based on the accumulated error over time. It helps eliminate steady-state error and can improve the stability of the control system.
Derivative (D) control: This component adjusts the output based on the rate of change of the error. It helps to dampen oscillations and improve the stability of the control system but is often omitted because PI control is sufficient. The derivative term can amplify measurement noise (random fluctuations) and cause excessive output changes. Filters are important to get a better estimate of the process variable rate of change.
The derivative of the error is substituted with the derivative of the Process Variable (PV) to avoid derivative kick when there is a setpoint change. The value of the controller output is transferred as the system input. The KP, KI, and KD parameters can also be written in terms of controller gain, integral reset time, and derivative time constant.
A PID (Proportional Integral Derivative) controller consists of three components that are adjusted based on the difference between a set point (SP) and a measured process variable (PV).
The output of a PID controller (u(t)) is calculated using the sum of the Proportional, Integral, and Derivative terms where KP, KI, and KD are constants that can be adjusted to fine-tune the performance of the controller.
Proportional (P) control: This component adjusts the output of the process based on the current error between the setpoint and the process variable (PV). The larger the error, the larger the correction applied.
Integral (I) control: This component adjusts the output based on the accumulated error over time. It helps eliminate steady-state error and can improve the stability of the control system.
Derivative (D) control: This component adjusts the output based on the rate of change of the error. It helps to dampen oscillations and improve the stability of the control system but is often omitted because PI control is sufficient. The derivative term can amplify measurement noise (random fluctuations) and cause excessive output changes. Filters are important to get a better estimate of the process variable rate of change.
The derivative of the error is substituted with the derivative of the Process Variable (PV) to avoid derivative kick when there is a setpoint change. The value of the controller output is transferred as the system input. The KP, KI, and KD parameters can also be written in terms of controller gain, integral reset time, and derivative time constant.
 0:09:25
0:09:25
PID Controller Explained
 0:07:44
0:07:44
PID Control - A brief introduction
 0:05:39
0:05:39
What is a PID Controller?
 0:49:18
0:49:18
Introduction to PID Control
 0:19:39
0:19:39
PID Control Overview
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:22:19
0:22:19
What is a PID Controller? | DigiKey
 0:27:11
0:27:11
EEVacademy #6 - PID Controllers Explained
 0:14:13
0:14:13
How PID Control Works - A Basic PID Introduction
 0:11:32
0:11:32
What is a PID Controller?
 0:04:51
0:04:51
#182 P, PI, PD, PID controllers || EC Academy
 0:08:10
0:08:10
PID Settings | Proportional-Only Control
 0:02:15
0:02:15
PID Control A Basic Introduction
 0:16:08
0:16:08
Everything You Need to Know About Control Theory
 0:01:05
0:01:05
Hardware In 60 Seconds: PID Control
 0:07:31
0:07:31
PID Controller Introduction
 0:10:02
0:10:02
PID Controllers made simple!
 0:03:42
0:03:42
XGB PID Part 1: PID Control Overview
 0:13:28
0:13:28
PID Control Theory and Practice Part 1, Definitions
 0:07:35
0:07:35
Principles of PID Controllers
 0:09:04
0:09:04
PID Control. What hardware do you need to learn Proportional Integral Derivative Control
 0:14:04
0:14:04
PID P-Only Controller Introduction
 0:09:29
0:09:29
PID Controller Explained | PID Controller tutorial Instrumentation
 0:10:00
0:10:00
PID control (English version)
Комментарии