filmov
tv
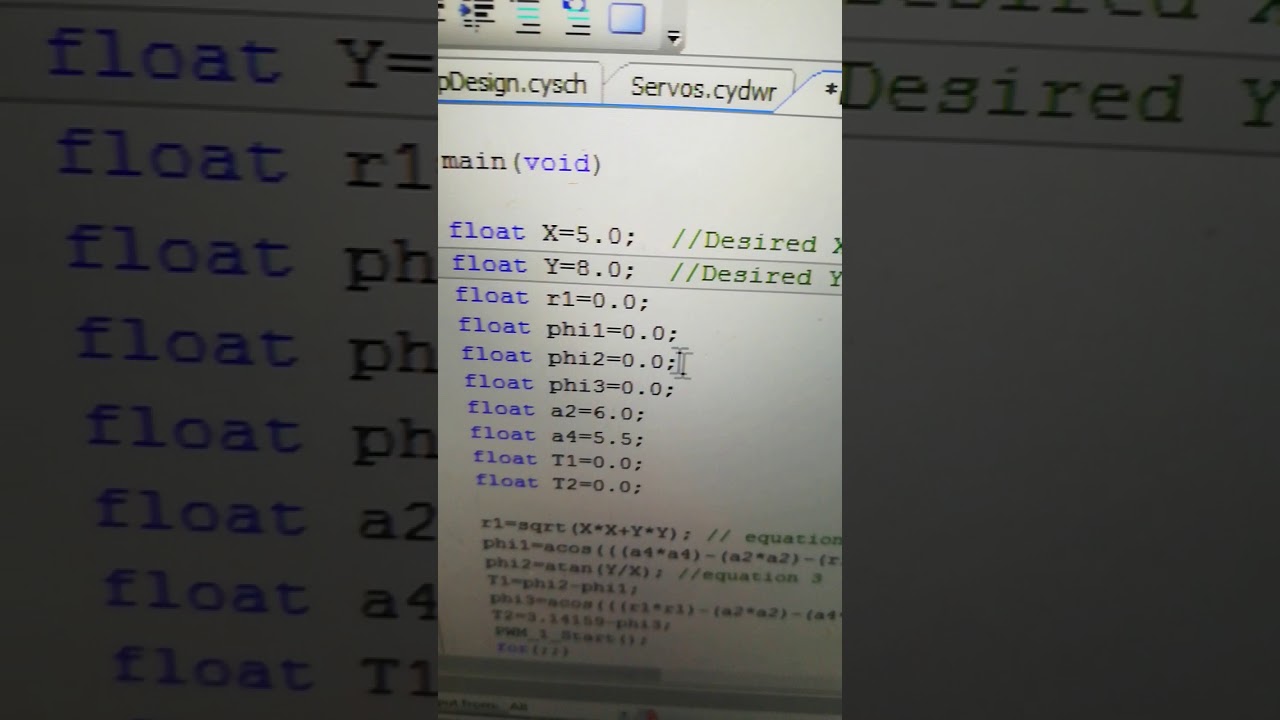
Inverse kinematic for position
Показать описание
 0:09:41
0:09:41
Inverse Kinematics of Robots | Robotics 101
 0:15:54
0:15:54
How Robots Use Maths to Move
 0:00:23
0:00:23
Inverse kinematic for position
 0:05:49
0:05:49
Easy inverse kinematics for robot arms
 0:13:29
0:13:29
Inverse Kinematics of Articulated Manipulator
 0:02:54
0:02:54
Inverse kinematics of a 2D Manipulator
 0:00:13
0:00:13
E.R.A. Robotic Arm Home Position Demo Using Inverse Kinematics
 0:08:54
0:08:54
5.1 Inverse Kinematics
 0:03:20
0:03:20
Forward and inverse kinematics #robotics #kinematics #animation
 0:15:28
0:15:28
Intro2Robotics Lecture 9a: Inverse Kinematics Position
 0:07:26
0:07:26
1. Kinematics of Robotic Manipulators
 0:32:33
0:32:33
Creating Dynamic Character Movements with Foot Inverse Kinematics and Open-Source Code
 0:07:19
0:07:19
How to cheat at Inverse Kinematics
 0:14:23
0:14:23
Robotics - Inverse Kinematics - Example
 0:36:46
0:36:46
Analytical Inverse Kinematics of 6DOF Denso Arm
 0:51:59
0:51:59
SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wrist
 0:00:44
0:00:44
Inverse Kinematic to position feet on the ground
 0:05:21
0:05:21
Introduction to DH Convention
 0:24:17
0:24:17
Aiming with Inverse Kinematics (IK) and Animation Rigging | Gun Series 12 | Unity Tutorial
 0:04:03
0:04:03
Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
 0:04:49
0:04:49
5 DOF Robotic Arm: Inverse Kinematics And Trajectory Planning
 0:00:18
0:00:18
how to solve inverse kinematics?
 0:02:30
0:02:30
Blender 2.8 Inverse Kinematics In 2 Minutes!
 0:12:16
0:12:16
Forward Kinematics (with solved examples) | Homogeneous Transformations | Robotics 101
Комментарии