filmov
tv
Robotics - Inverse Kinematics - Example

Показать описание
Connor with UConn HKN explains how to analyze a 3-link robotic manipulator using inverse kinematics.
 0:09:41
0:09:41
Inverse Kinematics of Robots | Robotics 101
 0:14:23
0:14:23
Robotics - Inverse Kinematics - Example
 0:05:51
0:05:51
Inverse kinematics. Explaining every step
 0:12:35
0:12:35
Inverse Kinematics (with solved example) | Planar RRP robot | Robotics 101
 0:05:49
0:05:49
Easy inverse kinematics for robot arms
 0:14:24
0:14:24
Robot Inverse Kinematics With A Hexapod Leg
 0:08:54
0:08:54
5.1 Inverse Kinematics
 0:26:19
0:26:19
Robotics 2 U1 (Kinematics) S5 (Inverse Kinematics) P2 (Procedure and Programming)
 0:51:59
0:51:59
SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wrist
 0:15:54
0:15:54
How Robots Use Maths to Move
 0:28:02
0:28:02
Robotics : Lecture 06 (Inverse Kinematics)
 0:46:13
0:46:13
Robotics 1 U1 (Kinematics) S6 (Inverse Kinematics) P1 (Inverse Kinematics)
 1:41:55
1:41:55
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-...
 0:53:24
0:53:24
Lecture - 2.10 -Inverse Kinematics
 0:13:59
0:13:59
Jacobian inverse kinematics. How to do it right
 0:00:23
0:00:23
Quadruped Robot Dog-MATLAB simulate Inverse kinematic Trot step
 0:01:09
0:01:09
KINEMATICS | Serial robot vs. Parallel robot (This is not CGI)
 0:15:23
0:15:23
Drive Robot Using Inverse Kinematics in Simulink | MATLAB 2021 | Robotic System Toolbox
 0:20:47
0:20:47
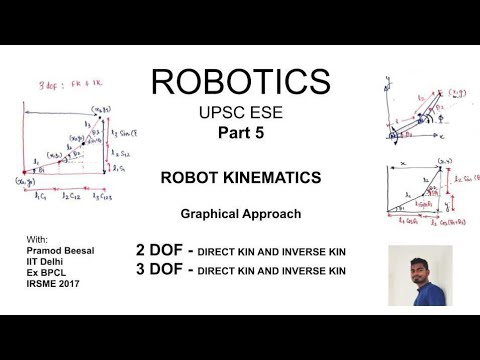
Robotics | Part 5 | Direct and Inverse Kinematics of 2 dof and 3 dof
 0:08:19
0:08:19
Learn Inverse Kinematics the Simple Way
 0:13:29
0:13:29
Inverse Kinematics of Articulated Manipulator
 0:02:54
0:02:54
Inverse kinematics of a 2D Manipulator
 0:19:33
0:19:33
Mini Robot Dog #4 - Inverse Kinematics
 0:07:19
0:07:19
How to cheat at Inverse Kinematics
Комментарии