filmov
tv
3-AXIS Accelerometer ADXL345 Gyroscope Gyro L3G4200D for Arduino Balance Self-balancing Robot

Показать описание
3-AXIS Accelerometer ADXL345 Gyroscope Gyro L3G4200D Used for Arduino Balance Self-balancing Robot
 0:01:18
0:01:18
3-AXIS Accelerometer ADXL345 Gyroscope Gyro L3G4200D for Arduino Balance Self-balancing Robot
 0:00:16
0:00:16
6 DOF IMU (3 axis accelerometer, 3 axis gyroscope), Arduino, OpenGL, Python, complementary filter
 0:09:20
0:09:20
How To Track Orientation with Arduino | ADXL345 Accelerometer Tutorial
 0:03:32
0:03:32
Arduino GYRO sensor (ADXL345)
 0:03:01
0:03:01
MPU6050 Sensor Arduino Tutorial
 0:00:56
0:00:56
GY87 [ MPU6050 ] 3-axis Accelerometer Demonstration with servos
 0:00:56
0:00:56
How Accelerometers and Gyroscopes Work
 0:06:11
0:06:11
How does an Accelerometer work? | 3D Animation
 0:06:17
0:06:17
How To Interface ADXL335 Analog Accelerometer Sensor With Arduino
 0:19:12
0:19:12
How to Use Accelerometers on the Arduino - Ultimate Guide to the Arduino #42
 0:09:57
0:09:57
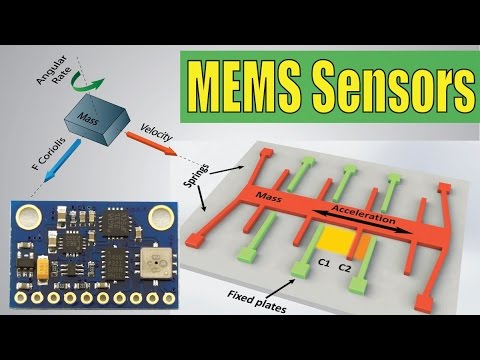
How MEMS Accelerometer Gyroscope Magnetometer Work & Arduino Tutorial
 0:06:33
0:06:33
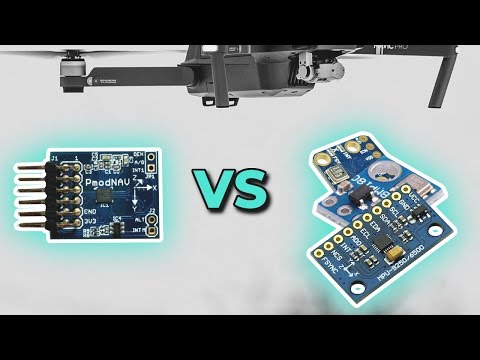
Accelerometer Gyroscope Magnetometer Sensors Quick Comparison | Digilent Pmod NAV VS MPU9250+BMP180
 0:00:28
0:00:28
ADXL345 + ITG3200 breakout board test
 0:02:38
0:02:38
Interfacing of accelerometer (ADXL345) with arduino mega
 0:10:19
0:10:19
Arduino #13 - 3 axis Accelerometer ADXL 345 - Robots, Quadcopters, etc.
 0:06:53
0:06:53
Calibrate the Orientation of ADXL345 Accelerometer with Arduino
 0:00:55
0:00:55
ADXL3A-B6 | ADXL345 accelerometer 3-Axis Digital Acceleration of Gravity Tilt module
 0:10:45
0:10:45
TUTORIAL: How to Wire Up & Code ADXL345 Gyroscope Accelerometer - (Arduino Module)
 0:00:27
0:00:27
ADXL345 Accelerometer / DC Motor
 0:12:53
0:12:53
DIY Gimbal | Arduino and MPU6050 Tutorial
![[Embedded] MPU6050/ADXL345 (Acceleration/Gyroscope)](https://i.ytimg.com/vi/AcYsNZ5n0cA/hqdefault.jpg) 0:01:16
0:01:16
[Embedded] MPU6050/ADXL345 (Acceleration/Gyroscope) Interfacing and Tilt | I2C | BBB
 0:00:09
0:00:09
Accelerometer Vs Gyroscope #trending #shorts #viral
 0:02:51
0:02:51
ks0012 ADXL345 Three Axis Acceleration Module
 0:00:47
0:00:47
3-Axis Accelerometer (ADXL345) + AVR + 0.96' OLED
Комментарии