filmov
tv
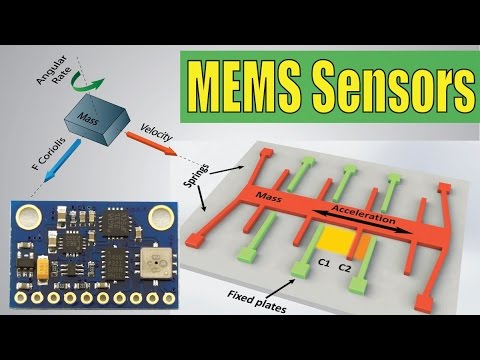
How MEMS Accelerometer Gyroscope Magnetometer Work & Arduino Tutorial

Показать описание
In this article we will learn how the MEMS accelerometer, gyroscope and magnetometer work and how to use them with the Arduino Board. Also with the Processing IDE we will make some practical applications using the sensors.
Like my page on Facebook:
Add me on Google+:
Like my page on Facebook:
Add me on Google+:
 0:09:57
0:09:57
How MEMS Accelerometer Gyroscope Magnetometer Work & Arduino Tutorial
 0:06:11
0:06:11
How does an Accelerometer work? | 3D Animation
 0:01:00
0:01:00
Micro mechanisms in your phone
 0:00:10
0:00:10
How Does An Accelerometer Sensor On a Mobile Phone Work
 0:01:02
0:01:02
How the Gyro Sensor Works
 0:00:23
0:00:23
How it works - MEMS Accelerometer
 0:00:16
0:00:16
6 DOF IMU (3 axis accelerometer, 3 axis gyroscope), Arduino, OpenGL, Python, complementary filter
 0:00:24
0:00:24
How small are MEMS gyro ? #shorts
 0:00:56
0:00:56
How Accelerometers and Gyroscopes Work
 0:00:19
0:00:19
Testing of High-Performance MEMS IMU-ER-MIMU-01 ~ #shorts
 0:00:25
0:00:25
MEMS Accelerometer Details Show ~ #shorts
 0:00:11
0:00:11
MEMS Gyroscope Calibration
 0:00:14
0:00:14
Arduino nano with MSP9250 MEMS chip: 3-axis accelerometer, gyroscope, & magnetometer
 0:00:19
0:00:19
What Makes MEMS IMU Different In Performance? #shorts
 0:01:31
0:01:31
EN | Bosch Working principle of a gyroscope for ESP®
 0:00:23
0:00:23
How to Assemble MEMS Gyroscopes Into an IMU? #shorts
 0:04:49
0:04:49
How Stuff Works??: Accelerometers Explained | Physics & MEMS Technology
 0:00:22
0:00:22
stm32f4 mems accelerometer test
 0:00:08
0:00:08
Gyroscope sensor data to rotation and accelerometer data to motion
 0:16:01
0:16:01
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, & Gyro Estimate
 0:01:10
0:01:10
Animation of accelerometer and magnetometer sensors fusion
 0:00:16
0:00:16
MPU 6050 sensor gyroscope accelerometer
 0:00:16
0:00:16
Ericco MEMS IMU Excellent Performance Test ~ #shorts
 0:10:03
0:10:03
Inside a MEMS Accelerometer (Re-upload: Fixed Audio)
Комментарии