filmov
tv
Rigid Body Kinematics Introduction | Rotation Matrix Relating Frames in 3D | Direction Cosine Matrix

Показать описание
Space Vehicle Dynamics 🛰 Lecture 12: Rigid body kinematics. Rotation matrices. Direction cosine matrix. To describe the orientation or attitude of a rigid body compared to a reference frame, we need to first consider a frame attached to the rigid body, then go about describing how the body-fixed frame is related to the inertial frame. Basic concepts first in 2D, then in 3D. The direction cosine matrix [C], sometimes abbreviated as the DCM, relates the frames (the triad of unit vectors) but also vectors in each frame. We discuss the direction cosine matrix on its own, before we discuss how to describe it in terms of 3 Euler angles in a later lecture, for example, yaw, pitch, and roll.
► Next: Euler Angles for Aerospace | Yaw, Pitch, Roll
► Previous, Rigid System of Particles | From Discrete Particles to the Continuous Limit of an Extended Mass Distribution
► More lectures posted regularly
► Dr. Shane Ross, aerospace engineering professor, Virginia Tech
Background: Caltech PhD | worked at NASA/JPL & Boeing
Research website for @ProfessorRoss
► Follow me on Twitter
► Lecture notes (PDF)
► All course videos (playlist)
► Reference:
Schaub & Junkins, Analytical Mechanics of Space Systems, 4th edition, 2018
- Typical reference frames in spacecraft dynamics
- Mission analysis basics: satellite geometry
- Kinematics of a single particle: rotating reference frames, transport theorem
- Dynamics of a single particle
- Multiparticle systems: kinematics and dynamics, definition of center of mass (c.o.m.)
- Multiparticle systems: motion decomposed into translational motion of c.o.m. and motion relative to the c.o.m.
- Multiparticle systems: imposing rigidity implies only motion relative to c.o.m. is rotation
- Rigid body: continuous mass systems and mass moments (total mass, c.o.m., moment of inertia tensor/matrix)
- Rigid body kinematics in 3D (rotation matrix and Euler angles)
- Rigid body dynamics; Newton's law for the translational motion and Euler’s rigid-body equations for the rotational motion
- Solving the Euler rotational differential equations of motion analytically in special cases
- Constants of motion: quantities conserved during motion, e.g., energy, momentum
- Visualization of a system’s motion
- Solving for motion computationally
#RigidBodyKinematics #RotationMatrix #Rotation #RigidBody #Kinematics #DirectionCosineMatrix #Rigidity #InertiaMatrix #MomentOfInertia #InertiaTensor #EngineeringDynamics #SystemOfParticles #ConservationOfEnergy #WorkedProblem #WorkedExample #Dumbbell #CenterOfMass #MatlabTutorial #Tutorial #Lecture #Matlab #NewtonsLaws #ConservationOfMomentum #SolutionStrategy #ProblemSolving #ProblemSolvingStrategy #TransportTheorem #RotatingFrame #InertialFrame #VectorDerivative #SatelliteGeometry #RotatingFrames #SpacecraftDynamics #SpaceVehicle #AttitudeDynamics #SpaceVehicleDynamics #RigidBodyDynamics #dynamics #LawsOfMotion #engineering #aerospace #ElonMusk #spacetravel #SpaceX #Boeing #Satellite #Satellites #SpaceDomainAwareness #NewtonsLaw #NewtonsLawofMotion #EquationOfMotion #Newtons2ndLaw #NewtonianMechanics #AOE3144 #Caltech #NASA #VirginiaTech #engineering #dynamics #mechanics #physics #mathematics #science #aerospace #mechanicalengineering #spacecraft #openaccess #OnlineCourse #technology #robotics #space #spaceindustry #math #biomechanics #vehicledynamics #simulation #aerodynamics #innovation #NewtonEuler #SingleDegreeofFreedom #LinearMotion #NonlinearDynamics #DynamicalSystems #AppliedMath #ChaosTheory #Bifurcation #DifferentialEquations #mathematics #Newton #math #FreeCourses #OnlineCourse #Lagrangianpoints #Lyapunov #VectorField #GraphicalMethod #FixedPoints #EquilibriumPoints #NonlinearODEs #StablePoint #UnstablePoint #Stability #LinearStability #StabilityAnalysis #VectorField #Pendulum #Poincare #mathematicians #maths #mathstudents #mathematician #mathfacts #mathskills #mathtricks
► Next: Euler Angles for Aerospace | Yaw, Pitch, Roll
► Previous, Rigid System of Particles | From Discrete Particles to the Continuous Limit of an Extended Mass Distribution
► More lectures posted regularly
► Dr. Shane Ross, aerospace engineering professor, Virginia Tech
Background: Caltech PhD | worked at NASA/JPL & Boeing
Research website for @ProfessorRoss
► Follow me on Twitter
► Lecture notes (PDF)
► All course videos (playlist)
► Reference:
Schaub & Junkins, Analytical Mechanics of Space Systems, 4th edition, 2018
- Typical reference frames in spacecraft dynamics
- Mission analysis basics: satellite geometry
- Kinematics of a single particle: rotating reference frames, transport theorem
- Dynamics of a single particle
- Multiparticle systems: kinematics and dynamics, definition of center of mass (c.o.m.)
- Multiparticle systems: motion decomposed into translational motion of c.o.m. and motion relative to the c.o.m.
- Multiparticle systems: imposing rigidity implies only motion relative to c.o.m. is rotation
- Rigid body: continuous mass systems and mass moments (total mass, c.o.m., moment of inertia tensor/matrix)
- Rigid body kinematics in 3D (rotation matrix and Euler angles)
- Rigid body dynamics; Newton's law for the translational motion and Euler’s rigid-body equations for the rotational motion
- Solving the Euler rotational differential equations of motion analytically in special cases
- Constants of motion: quantities conserved during motion, e.g., energy, momentum
- Visualization of a system’s motion
- Solving for motion computationally
#RigidBodyKinematics #RotationMatrix #Rotation #RigidBody #Kinematics #DirectionCosineMatrix #Rigidity #InertiaMatrix #MomentOfInertia #InertiaTensor #EngineeringDynamics #SystemOfParticles #ConservationOfEnergy #WorkedProblem #WorkedExample #Dumbbell #CenterOfMass #MatlabTutorial #Tutorial #Lecture #Matlab #NewtonsLaws #ConservationOfMomentum #SolutionStrategy #ProblemSolving #ProblemSolvingStrategy #TransportTheorem #RotatingFrame #InertialFrame #VectorDerivative #SatelliteGeometry #RotatingFrames #SpacecraftDynamics #SpaceVehicle #AttitudeDynamics #SpaceVehicleDynamics #RigidBodyDynamics #dynamics #LawsOfMotion #engineering #aerospace #ElonMusk #spacetravel #SpaceX #Boeing #Satellite #Satellites #SpaceDomainAwareness #NewtonsLaw #NewtonsLawofMotion #EquationOfMotion #Newtons2ndLaw #NewtonianMechanics #AOE3144 #Caltech #NASA #VirginiaTech #engineering #dynamics #mechanics #physics #mathematics #science #aerospace #mechanicalengineering #spacecraft #openaccess #OnlineCourse #technology #robotics #space #spaceindustry #math #biomechanics #vehicledynamics #simulation #aerodynamics #innovation #NewtonEuler #SingleDegreeofFreedom #LinearMotion #NonlinearDynamics #DynamicalSystems #AppliedMath #ChaosTheory #Bifurcation #DifferentialEquations #mathematics #Newton #math #FreeCourses #OnlineCourse #Lagrangianpoints #Lyapunov #VectorField #GraphicalMethod #FixedPoints #EquilibriumPoints #NonlinearODEs #StablePoint #UnstablePoint #Stability #LinearStability #StabilityAnalysis #VectorField #Pendulum #Poincare #mathematicians #maths #mathstudents #mathematician #mathfacts #mathskills #mathtricks
 0:07:21
0:07:21
Rigid Bodies Relative Motion Analysis: Velocity Dynamics (Learn to solve any question step by step)
 0:08:28
0:08:28
Rigid-Body Kinematics - Introduction
 0:03:01
0:03:01
28.1 Rigid Bodies
 0:02:58
0:02:58
Chapter 12 Introduction - Rigid Body Kinematics - JPM
 0:22:39
0:22:39
Rigid Body Kinematics: Introduction
 0:55:07
0:55:07
Rigid Body Kinematics Introduction | Rotation Matrix Relating Frames in 3D | Direction Cosine Matrix
 0:33:54
0:33:54
1st video on rigid body kinematics
 0:13:54
0:13:54
6.1 Introduction to Planar Rigid Body Kinematics
 0:40:21
0:40:21
Classical Mechanics - Rigid Body Mechanics : Euler’s Angles
 0:17:26
0:17:26
Rigid Body Kinematics
 0:10:28
0:10:28
Introduction to Kinematics
 0:11:39
0:11:39
Rigid Body Kinematics - Theory
 0:17:59
0:17:59
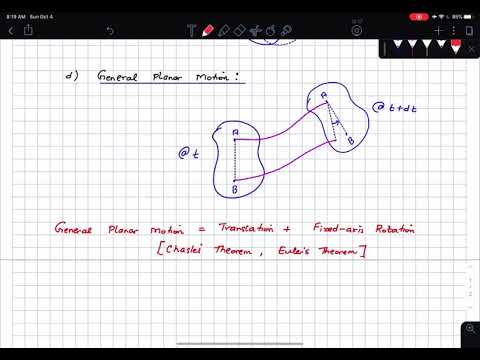
Dynamics: Rigid Body Kinematics - Rigid Body Motion Types
 0:35:08
0:35:08
Introduction to Kinematics of Rigid Bodies - Kinematics of Rigid Bodies - Engineering Mechanics
 0:34:07
0:34:07
Introduction to Kinematics of Rigid Bodies - Kinematics of Rigid Bodies - Engineering Mechanics
 0:22:51
0:22:51
3.1) Kinematics of Rigid Bodies-Introduction & Pure Translation | Engineering Mechanics
 0:20:34
0:20:34
Rigid Body Mechanics: Dynamics - Basic Introduction (Rectilinear Kinematics, Acceleration, Velocity)
 0:10:26
0:10:26
Kinematics Of Rigid Bodies - General Plane Motion - Solved Problems
 0:25:40
0:25:40
Lec34 - Rigid Body 3D Kinematics (Theory)
 0:06:25
0:06:25
Engineering Mechanics Introduction | Rigid Body - Kinetic, Kinematics, Static and Dynamic
 0:50:00
0:50:00
Lecture 19 Intro to Rigid Body Kinematics
 0:33:49
0:33:49
Dynamics of Rigid Bodies: Basic Introduction
 0:24:57
0:24:57
Topic 1 Planar Rigid Body Motion, Translation, Rotation about a Fixed Axis Part 1
 0:41:21
0:41:21
Rigid Body Kinematics Introduction and Relative Motion Analysis (Sec 16.1-16.3, 16.5)
Комментарии