filmov
tv
Introduction To Stepper Motor Motion Control. Pulse And Direction.

Показать описание
In this lesson we go over how stepper motors and drives use pulse and direction for precise positioning in motion control applications. Steppers can use the pulse and direction control to maintain accuracy despite not requiring an encoder. Using basic switches wired to the pulse and direction input, we can make a tutorial where we manually move the stepper motor.
Items used in this video:
The above links make these videos possible. Please use them!
Items used in this video:
The above links make these videos possible. Please use them!
 0:08:10
0:08:10
Introduction To Stepper Motor Motion Control. Pulse And Direction.
 0:10:32
0:10:32
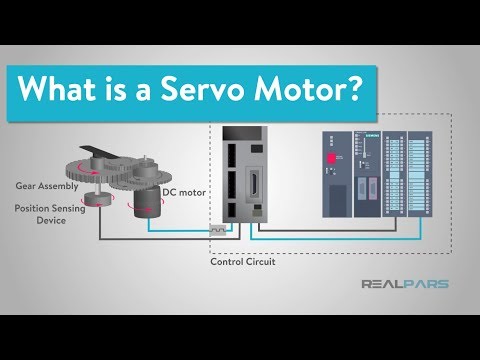
Introduction to Servo Motors and Motion Controllers
 0:29:57
0:29:57
Stepper Motors and Arduino - The Ultimate Guide
 0:02:32
0:02:32
Servo vs Stepper Motors
 0:05:53
0:05:53
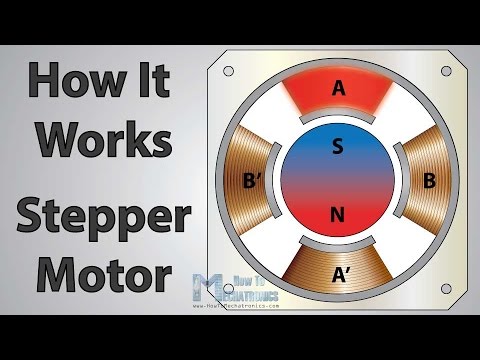
How does a Stepper Motor work?
 0:02:42
0:02:42
What is a Stepper Motor?
 0:20:44
0:20:44
Stepper Motor
 0:04:43
0:04:43
Stepper Motor - How It Works
 0:04:06
0:04:06
Stepper Motor Forward and Reverse Control Using PLC & HMI
 0:11:00
0:11:00
Introduction to Stepper Motors for 3D Printing - The Basics you probably need to know - Episode 1
 0:33:55
0:33:55
Motion Control Electronics Introduction
 0:06:53
0:06:53
Stepper motor driver basics
 0:00:23
0:00:23
42 Stepper Motor Features - NEMA17 Motor Features Introduction - 42 stepper
 0:02:31
0:02:31
Introducing Applied Motion's STM-R Integrated Stepper Motor+Drive
 0:02:46
0:02:46
Leadshine Integrated Stepper Motors Brief Introduction
 0:00:16
0:00:16
Stepper Motor Controller
 0:00:30
0:00:30
What Is A Stepper Motor? Watch This!
 0:03:21
0:03:21
Introducing the STM24 Integrated Stepper Motor
 0:07:24
0:07:24
How does a Stepper Motor work? Full lecture
 0:15:45
0:15:45
What is a Servo Motor and How it Works?
![MS08b. [Stepper Motor]](https://i.ytimg.com/vi/3BtAK2De0XI/hqdefault.jpg) 0:34:09
0:34:09
MS08b. [Stepper Motor] 1/2 Siemens S7-1200 PLC PTO Stepper Motor Control (Technology Object in TIA)
 0:02:41
0:02:41
An Introduction to AMP's STAC5 Stepper Drives
 0:08:36
0:08:36
What is a Stepper Motor and How it Works?
 0:02:08
0:02:08
Microstepping Overview | Kollmorgen | 2 Min of Motion
Комментарии