filmov
tv
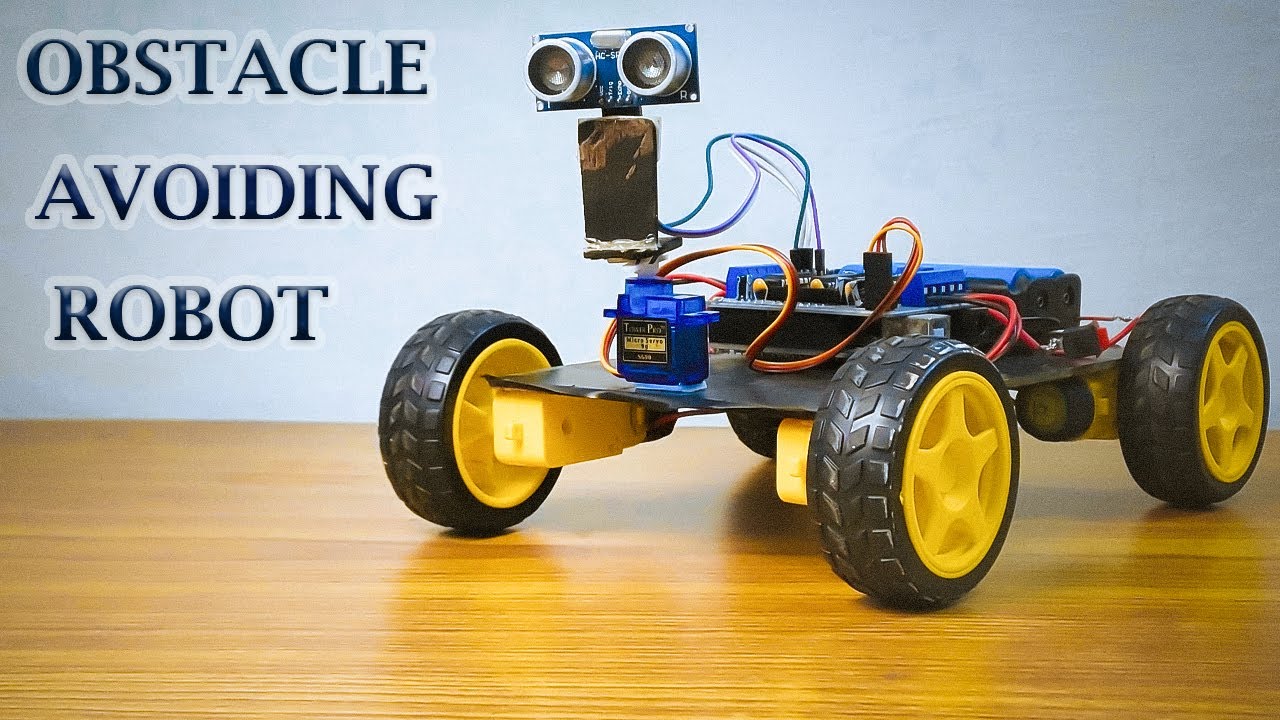
How to make Obstacle Avoiding Robot using Arduino !!
Показать описание
In this video I have shown how to build an obstacle avoiding robot using Arduino Uno microcontroller. If an object comes ahead of it the robot stops, move back a little bit, look left/right and then it turns that side which has greater distance.
---------------------------------------
Components required
Video gear
----------------------------------------
if you liked the video then don't forget to subscribe my channel for more such content.
#diyprojects #robot #electronic #smartcars
---------------------------------------
Components required
Video gear
----------------------------------------
if you liked the video then don't forget to subscribe my channel for more such content.
#diyprojects #robot #electronic #smartcars
 0:06:09
0:06:09
How To Make A DIY Arduino Obstacle Avoiding Car At Home
 0:13:10
0:13:10
Arduino obstacle avoiding + voice control + Bluetooth control Robot | DIY Arduino Robot
 0:06:45
0:06:45
How to make Arduino Obstacle Avoiding Robot Car | Under $20
 0:00:10
0:00:10
BAD ACCIDENT - Obstacle avoiding Robot Car #arduinoprojects
 0:00:16
0:00:16
Obstacle Avoiding Car using Ultrasonic sensor | Path Finder Robot
 0:00:14
0:00:14
DIY Obstacle Avoiding Robot #roboarmy #scienceproject #arduinoprojects #obstacleavoidance
 0:06:44
0:06:44
Intelligent Obstacle Avoiding Robot || Step by Step Tutorial || Arduino Project
 0:08:06
0:08:06
How to make an obstacle avoiding robot with three ultrasonic sensors | Step by step
 0:00:28
0:00:28
Obstacle Avoidance Robot Arduinouno | Ultrasonic Sensor | L293D motordriver shield
 0:10:35
0:10:35
How to make a 4WD OBSTACLE AVOIDING CAR | OBSTACLE AVOIDING CAR with L293D motor driver shield
 0:00:15
0:00:15
Obstacle avoiding robot
 0:06:55
0:06:55
Arduino Obstacle Avoiding Robot Part III
 0:00:11
0:00:11
Obstacle-Avoiding Robot #arduino #robot #electronic #science #diy
 0:06:37
0:06:37
Arduino Simple Obstacle Avoiding ROBO
 0:10:26
0:10:26
How to Make Arduino Obstacle Avoiding Robot with L298N H-Bridge Motor Driver
 0:08:32
0:08:32
Obstacle Avoiding Robot Car Using Arduino |How to make Arduino Robot Car | #obstacleavoidingrobot
 0:20:31
0:20:31
how to make obstacle avoiding robot using Arduino and ultrasonic sensor [low cost]
 0:00:21
0:00:21
Arduino self-driving Line follower and obstacle avoidance robot
 0:00:06
0:00:06
Path Finder & Obstacle Avoiding Robot Using Arduino
 0:06:17
0:06:17
Arduino Obstacle Avoiding Robot Car | DIY
 0:06:31
0:06:31
How to make Obstacle Avoiding Robot- Advanced Algorithm (AA) || Scans LEFT & RIGHT
 0:00:15
0:00:15
Obstacle Avoiding Robot car 🚕🤩 #innovation #shorts
 0:10:40
0:10:40
Obstacle Avoiding Robot Car Using An Arduino
 0:05:41
0:05:41
How to make Obstacle Avoiding Robot using Arduino !!
Комментарии