filmov
tv
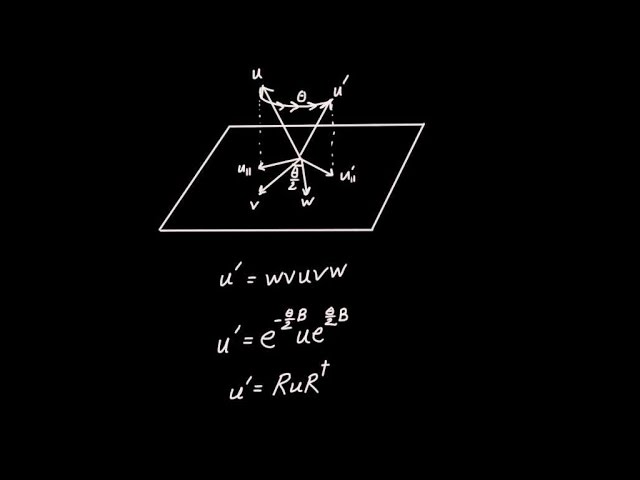
Geometric Algebra - 3D Rotations and Rotors
Показать описание
In this video, we employ the fact that two reflections is a rotation to perform rotations in 3D. We also will derive the general rotation formula, show how to compose rotations, and introduce the rotor version of this formula and discover the rotor's sign flip under a 2pi rotation.
References / Further Reading:
1. Lasenby and Doran's "Geometric Algebra for Physicists".
Note: This video builds off prior videos in this series, particularly:
Erratum:
33:50 - the sine function is odd, not even.
References / Further Reading:
1. Lasenby and Doran's "Geometric Algebra for Physicists".
Note: This video builds off prior videos in this series, particularly:
Erratum:
33:50 - the sine function is odd, not even.
 0:48:59
0:48:59
Geometric Algebra - 3D Rotations and Rotors
 0:16:48
0:16:48
Let's remove Quaternions from every 3D Engine: Intro to Rotors from Geometric Algebra
 0:44:23
0:44:23
A Swift Introduction to Geometric Algebra
 0:00:41
0:00:41
Quaternions Are Not Four-Dimensional Objects
 0:05:49
0:05:49
Basic Intro to Quaternions for 3D Rotations
 0:54:38
0:54:38
A Swift Introduction to Projective Geometric Algebra
 0:14:44
0:14:44
The Fascinating perspective of Geometric Algebra #SoMEpi
 0:00:51
0:00:51
Connecting GA Rotation Formulas
 0:02:31
0:02:31
Basics of Rotation | Intro to Geometric Algebra
 0:04:46
0:04:46
Three-dimensional linear transformations | Chapter 5, Essence of linear algebra
 0:36:26
0:36:26
Geometric Algebra - Rotors and Quaternions
 0:00:54
0:00:54
Geometric Algebra vs. Clifford Algebra
 0:15:34
0:15:34
Geometric Algebra, First Course, Episode 12: Rotations
 0:00:42
0:00:42
The Square Root of a Rotor
 0:00:53
0:00:53
Are Bivectors Always Plane Segments?
 0:06:21
0:06:21
2.7 Rotations | Geometric Algebra for Physicists
 0:06:53
0:06:53
Quick Understanding of Homogeneous Coordinates for Computer Graphics
 0:00:52
0:00:52
Decomposition of a 3D PGA Bivector
 0:24:55
0:24:55
SR in 3D Geometric Algebra: Frames and Rotors
 0:23:40
0:23:40
Addendum to A Swift Introduction to Geometric Algebra
 0:32:50
0:32:50
Applications Of Conformal Geometric Algebra To Transmission Line Theory
 0:33:09
0:33:09
3D Rotations in General: Rodrigues Rotation Formula and Quaternion Exponentials
 0:00:57
0:00:57
Counterexamples in Geometric Algebra
 1:00:35
1:00:35
Geometric Algebra 19 3D Geometric Algebra
Комментарии