filmov
tv
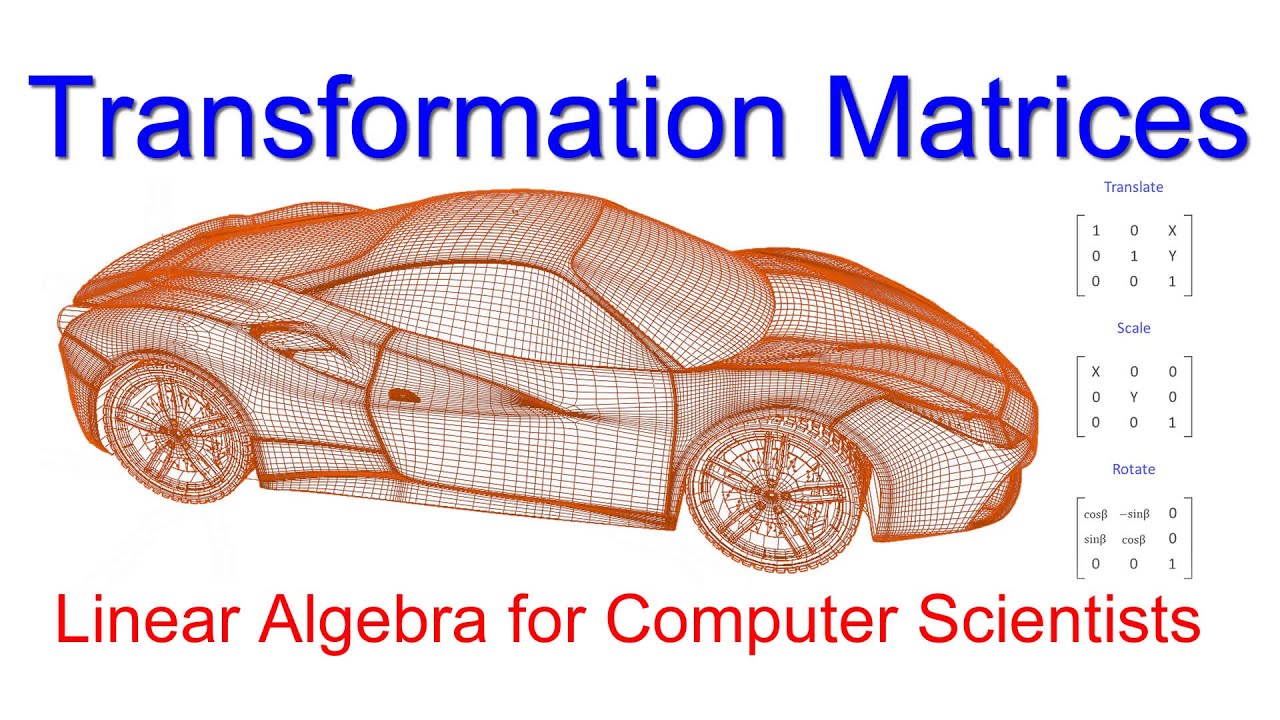
Linear Algebra for Computer Scientists. 13. Transformation Matrices
Показать описание
Animated computer graphics are based on models composed of thousands of tiny primitive shapes such as triangles, and each vertex in a model is encoded as a vector. This computer science video demonstrates how matrices are used to transform these vector. In particular you will learn how to derive a two dimensional rotation matrix using trigonometric identities, and how to transform a model in two dimensional space with a scaling matrix, a translation matrix and a rotation matrix. You will also learn how several transformation matrices can be combined using matrix multiplication to create a single transformation matrix that encodes multiple transformations at once.
Chapters:
00:00 Introduction to 3D computer models
00:50 Scale a vector with a vector
02:10 Translate a vector with a vector
02:40 Derive a rotation matrix using trigonometric identities
07:42 Rotate a vector with a matrix
08:48 Scale a vector with a matrix
09:32 Scale and rotate a vector with a single matrix
10:42 2D translation matrices
13:06 Translation, rotation and scaling combined
15:05 The role of a graphics processing unit (GPU)
Chapters:
00:00 Introduction to 3D computer models
00:50 Scale a vector with a vector
02:10 Translate a vector with a vector
02:40 Derive a rotation matrix using trigonometric identities
07:42 Rotate a vector with a matrix
08:48 Scale a vector with a matrix
09:32 Scale and rotate a vector with a single matrix
10:42 2D translation matrices
13:06 Translation, rotation and scaling combined
15:05 The role of a graphics processing unit (GPU)
 0:09:50
0:09:50
Linear Algebra for Computer Scientists. 1. Introducing Vectors
 0:09:20
0:09:20
Linear Algebra for Computer Scientists. 12. Introducing the Matrix
 0:15:44
0:15:44
Linear Algebra for Computer Scientists. 13. Transformation Matrices
 0:09:32
0:09:32
10 Math Concepts for Programmers
 0:00:52
0:00:52
This Will Help You With Linear Algebra
 0:09:57
0:09:57
Why is Linear Algebra Useful?
 0:09:52
0:09:52
Vectors | Chapter 1, Essence of linear algebra
 0:17:06
0:17:06
Linear Algebra for Computer Scientists
 0:03:30
0:03:30
Probability & Statistics for GATE 2025 Data Science & Artificial Intelligence Complete Roadm...
 0:16:26
0:16:26
Dear linear algebra students, This is what matrices (and matrix manipulation) really look like
 0:02:14
0:02:14
Gilbert Strang: Linear Algebra vs Calculus
 0:14:54
0:14:54
The Math Needed for Computer Science
 0:14:15
0:14:15
Math for Computer Science
 0:04:09
0:04:09
Linear Algebra for Computer Scientists. 3. Vector Addition
 0:00:46
0:00:46
Linear Algebra Book With Solutions
 0:04:15
0:04:15
Intro: A New Way to Start Linear Algebra
 0:00:28
0:00:28
Learn Computer Science With This Book
 6:05:12
6:05:12
Linear Algebra Course – Mathematics for Machine Learning and Generative AI
 0:09:24
0:09:24
Linear Algebra for Computer Scientists. 14. 3D Transformation Matrices
 0:10:59
0:10:59
Linear transformations and matrices | Chapter 3, Essence of linear algebra
 0:00:24
0:00:24
Proof Based Linear Algebra Book
 0:04:57
0:04:57
Linear Algebra for Computer Scientists. 10. The Standard Basis
 0:41:23
0:41:23
Linear Algebra - Math for Machine Learning
 0:00:59
0:00:59
Linear Algebra Book With Solutions #mathematics #mathematics #maths
Комментарии