filmov
tv
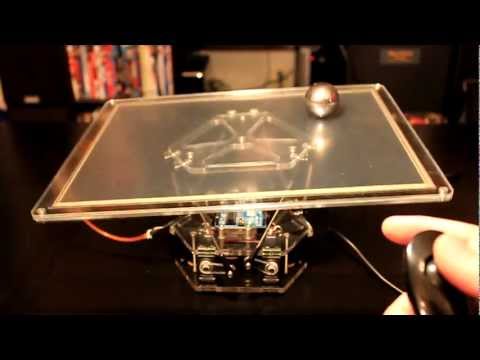
Ball and Plate Control with servosystem and dSpace RT System

Показать описание
OBSERVATION AND CONTROL FOR THE BALL AND PLATE SYSTEM.
CONTROL APROACHES: FEEDBACK LINEARIZATION, BACKSTEPPING, SLIDING MODE
OBSERVATION APPROACHES: EXTENDED KALMAN FILTER , LUENBERGER OBSERVER
SIMULATION: MATLAB/ SIMULINK
IMPLEMENTATION: CONTROL DESK - DSPACE
Documentation:
CONTROL APROACHES: FEEDBACK LINEARIZATION, BACKSTEPPING, SLIDING MODE
OBSERVATION APPROACHES: EXTENDED KALMAN FILTER , LUENBERGER OBSERVER
SIMULATION: MATLAB/ SIMULINK
IMPLEMENTATION: CONTROL DESK - DSPACE
Documentation:
 0:00:19
0:00:19
 0:00:37
0:00:37
 0:03:32
0:03:32
 0:01:08
0:01:08
 0:02:23
0:02:23
 0:00:40
0:00:40
 0:01:44
0:01:44
 0:00:17
0:00:17
 0:05:26
0:05:26
 0:00:28
0:00:28
 0:02:03
0:02:03
 0:03:02
0:03:02
 0:01:08
0:01:08
 0:02:42
0:02:42
 0:02:05
0:02:05
 0:00:18
0:00:18
 0:00:52
0:00:52
 0:00:44
0:00:44
 0:02:12
0:02:12
 0:01:29
0:01:29
 0:00:48
0:00:48
 0:01:56
0:01:56
 0:13:54
0:13:54
 0:03:26
0:03:26