filmov
tv
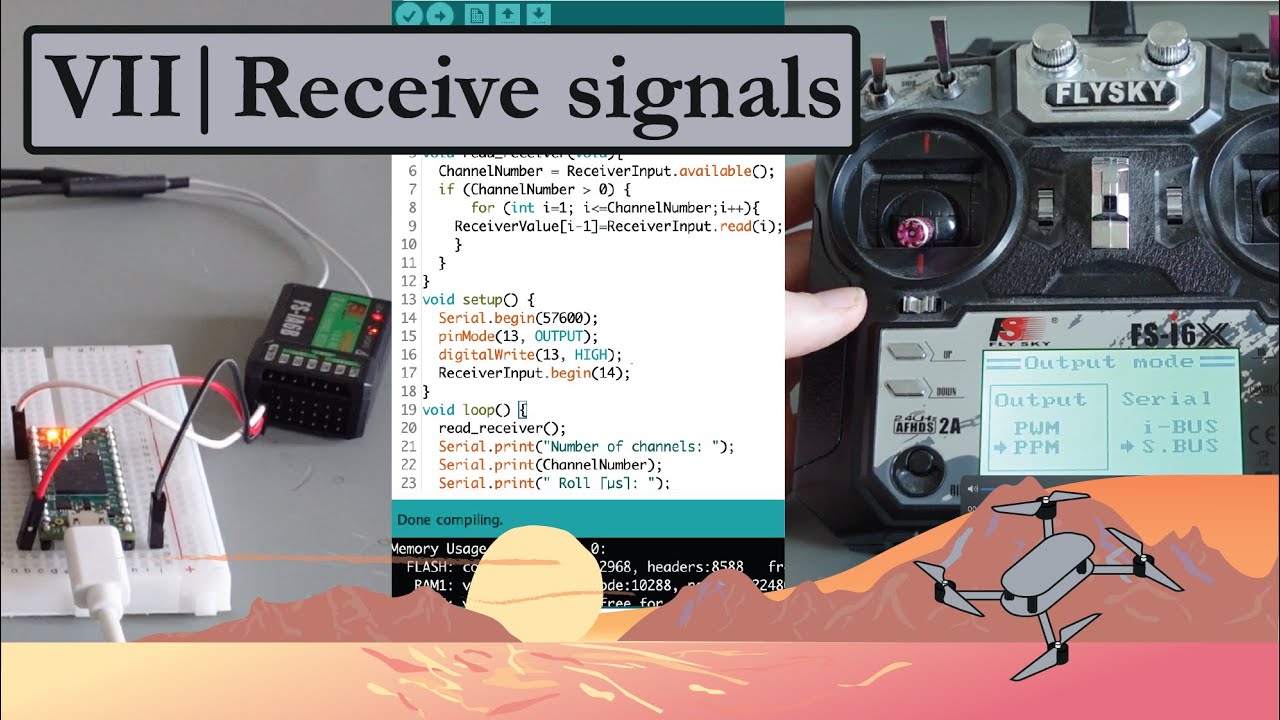
7 | Connect a receiver to your Teensy in 30 Arduino code lines
Показать описание
This video explains the concepts behind PWM (Pulse Width Modulation) and PPM (Pulse Position Modulation). You will use PPM to transfer signals from the FS-IA6B receiver with one signal cable to your Teensy 4.0 microcontroller with the help of the Arduino IDE. The Flysky FS-I6X radiotransmitter is used for this part.
The purpose of this video series is to learn the basics behind a quadcopter drone and enable you to build one yourself, by dividing this challenging project in several easy-to-understand parts. You use the capable Teensy 4.0 microcontroller together with the easy-to-use Arduino language.
The purpose of this video series is to learn the basics behind a quadcopter drone and enable you to build one yourself, by dividing this challenging project in several easy-to-understand parts. You use the capable Teensy 4.0 microcontroller together with the easy-to-use Arduino language.
 0:10:07
0:10:07
How to Connect a TV to AVR surround sound Receiver
 0:04:55
0:04:55
HOW TO CONNECT RECEIVER TO BOSE SUB REVIEW
 0:06:29
0:06:29
How To Set Up a Home Theater System Using a Receiver
 0:07:46
0:07:46
Fast Easy Home Theater Receiver Hook Up Guide
 0:16:37
0:16:37
How to Add an Amplifier to Your AV Receiver - Home Theater Basics
 0:05:53
0:05:53
Yamaha AV Receiver: How to Connect Speakers
 0:09:33
0:09:33
How to Get MORE Power From Your AV Receiver - Home Theater Basics
 0:06:39
0:06:39
7 | Connect a receiver to your Teensy in 30 Arduino code lines
 0:11:37
0:11:37
🎤 How to Mic Up an Athlete 🗣️ Mic'd Up Sports Tutorial 🎧
 0:07:28
0:07:28
You Don't Need a Receiver to Have a Surround Sound System!
 0:17:02
0:17:02
How to Connect An AV Receiver (AVR) | EASY Step By Step Instructions
 0:05:09
0:05:09
NEW JBL MA710 8K AV Receiver! | Unboxing & Demo | JBL Home Cinema | Expressive Audio
 0:04:25
0:04:25
What is an AV Receiver and WHY You Need One - Home Theater Basics
 0:05:51
0:05:51
HOW TO CONNECT A PASSIVE SUBWOOFER TO A RECEIVER
 0:02:56
0:02:56
How to Connect Receiver to Smart TV Surround Sound
 0:01:51
0:01:51
HOW TO CONNECT OLD RECEIVER TO NEW TV
 0:05:36
0:05:36
How to Connect Amazon Fire TV to Surround Receiver
 0:09:33
0:09:33
How to add an External Amplifier to your Home Theater Receiver!
 0:01:46
0:01:46
How to get TV Audio via your Denon AV Receiver with an (ARC) connection
 0:03:35
0:03:35
Dexcom G7 Receiver - How to Get Started and Set Up the Receiver
 0:00:31
0:00:31
SONY STR DN850 4K WiFi Bluetooth 7 2 Ch A:V RECEIVER 150W HDMI
 0:10:02
0:10:02
7 Receiver Tips & Tricks To Level Up Your Listening: Levels, EQ, Pre-Outs and More
 0:00:22
0:00:22
A perfect 7.1 Home Theater Surround System integrating Denon AV receiver with SVS speakers,subwoofer
 0:17:22
0:17:22
Yamaha AV Receiver Full Setup Tutorial(Dolby,Hdmi,Panorama etc)//How To Setup AV Receiver Manually
Комментарии