filmov
tv
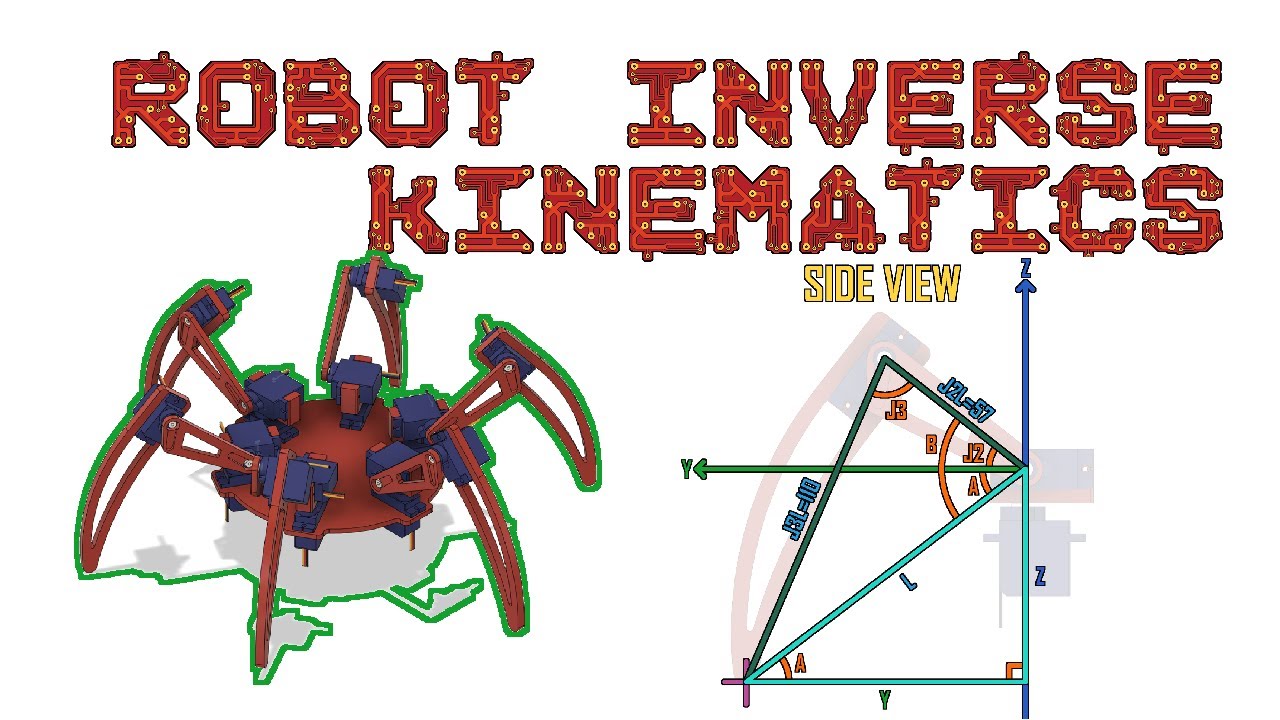
Robot Inverse Kinematics With A Hexapod Leg
Показать описание
This video has a detailed inverse kinematic solution for a 3 axis robot and videos of it in action applying the solution. There are also some mistakes that I cover that happened along the way and crucially unlike most other videos the arm segments are NOT the same length.
The code can be found here and is free to use and adapt:
Music from #Uppbeat (free for Creators!):
The code can be found here and is free to use and adapt:
Music from #Uppbeat (free for Creators!):
 0:09:41
0:09:41
Inverse Kinematics of Robots | Robotics 101
 0:14:24
0:14:24
Robot Inverse Kinematics With A Hexapod Leg
 0:05:49
0:05:49
Easy inverse kinematics for robot arms
 0:12:35
0:12:35
Inverse Kinematics (with solved example) | Planar RRP robot | Robotics 101
 0:08:52
0:08:52
Inverse kinematics of a ball balancing robot.
 0:14:23
0:14:23
Robotics - Inverse Kinematics - Example
 0:04:03
0:04:03
Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
 0:15:54
0:15:54
How Robots Use Maths to Move
 0:00:18
0:00:18
Inverse Kinematics
 0:01:09
0:01:09
KINEMATICS | Serial robot vs. Parallel robot (This is not CGI)
 0:04:49
0:04:49
5 DOF Robotic Arm: Inverse Kinematics And Trajectory Planning
 0:00:23
0:00:23
3D printed 6-Axis Robot with inverse kinematics
 0:09:46
0:09:46
Part 1 - How to Solve Inverse Kinematics of a 4 Leg Robot
 0:51:59
0:51:59
SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wrist
 0:46:13
0:46:13
Robotics 1 U1 (Kinematics) S6 (Inverse Kinematics) P1 (Inverse Kinematics)
 0:26:19
0:26:19
Robotics 2 U1 (Kinematics) S5 (Inverse Kinematics) P2 (Procedure and Programming)
 0:08:54
0:08:54
5.1 Inverse Kinematics
 0:13:29
0:13:29
Inverse Kinematics of Articulated Manipulator
 0:00:56
0:00:56
Robot Dog Having 7 Axis Robotic Arm : Testing Inverse Kinematics Algorithms | #shorts #ytshorts |
 0:00:23
0:00:23
Quadruped Robot Dog-MATLAB simulate Inverse kinematic Trot step
 0:07:19
0:07:19
How to cheat at Inverse Kinematics
 0:06:17
0:06:17
Building a robot dog #1 Hardware, Inverse Kinematics
 0:00:13
0:00:13
E.R.A. Robotic Arm Home Position Demo Using Inverse Kinematics
 0:00:16
0:00:16
Home & Calibration, 3D printing with Robot Arm (Inverse Kinematics)
Комментарии