filmov
tv
OpenCV Python Camera Calibration (Intrinsic, Extrinsic, Distortion)

Показать описание
In this video, I will go over how to do camera calibration in OpenCV using python in VS Code. I will show you how we can take several images of chessboard pattern and use that to find our camera parameters (intrinsics and extrinsics). This will let us find our focal length, camera center, distortion coefficients, rotation and translation vectors. I will then show you how to remove distortion from an image.
0:00 Introduction
0:19 What is camera calibration? (Intrinsic, Extrinsic, Pinhole Model)
3:37 Why do we need camera calibration?
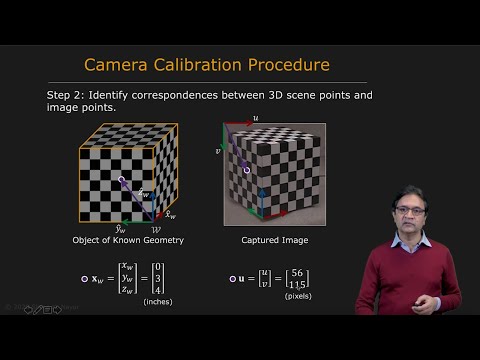
3:50 How does camera calibration work?
5:20 Code
Thanks for watching! If you found this video helpful, please like, subscribe and share:
Social:
0:00 Introduction
0:19 What is camera calibration? (Intrinsic, Extrinsic, Pinhole Model)
3:37 Why do we need camera calibration?
3:50 How does camera calibration work?
5:20 Code
Thanks for watching! If you found this video helpful, please like, subscribe and share:
Social:
 0:14:24
0:14:24
OpenCV Python Camera Calibration (Intrinsic, Extrinsic, Distortion)
 0:05:18
0:05:18
Camera Calibration in less than 5 Minutes with OpenCV
 0:28:49
0:28:49
Learn Camera Calibration in OpenCV with Python Script
 0:04:28
0:04:28
Camera Calibration using OpenCV
 0:05:59
0:05:59
Camera Intrinsics and Extrinsics - 5 Minutes with Cyrill
 0:07:47
0:07:47
Camera Calibration | Camera Calibration
 0:27:11
0:27:11
Stereo Vision Camera Calibration with OpenCV: How to Calibrate your Camera with Python Script
 0:05:48
0:05:48
Camera Calibration OOP Class [OpenCV Python]
 0:01:48
0:01:48
Stereo Calibration | Python | OpenCV | PyQT |
 0:25:17
0:25:17
Auto-Measuring with OpenCV + Python - Try It Yourself
 0:00:16
0:00:16
Camera Calibration
 0:04:49
0:04:49
Camera calibration using OpenCV
 0:12:01
0:12:01
【PYTHON OPENCV】Aruco camera calibration
 0:15:26
0:15:26
Calibrate OpenCV Camera In Under 15 Minutes
 0:00:08
0:00:08
openCV camera calibration
 0:00:17
0:00:17
ROS Camera Calibration (calibrating process)
 0:05:40
0:05:40
Camera calibration using opencv
 0:15:16
0:15:16
ASSIGNMENT 1 : CAMERA CALIBRATION USING PYTHON ( GROUP 9 )
 0:00:30
0:00:30
OpenCV Camera Calibration and Camera Pose Estimation
 0:05:45
0:05:45
Opencv calibration and undistort
 0:06:25
0:06:25
OpenCV Camera Calibration - Intrinsic and Extrinsic
 0:00:30
0:00:30
OpenCV Camera Calibration from Google Colab Using Chessboard image
 0:01:43
0:01:43
Automated camera calibration (Raspberry pi & opencv)
 0:00:50
0:00:50
How to calibrate OpenCV Camera
Комментарии