filmov
tv
Stereo Vision Camera Calibration with OpenCV: How to Calibrate your Camera with Python Script

Показать описание
You will also get access to all the technical courses inside the program, also the ones I plan to make in the future! Check out the technical courses below 👇
_____________________________________________________________
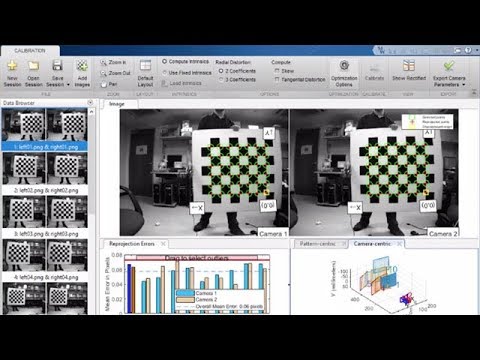
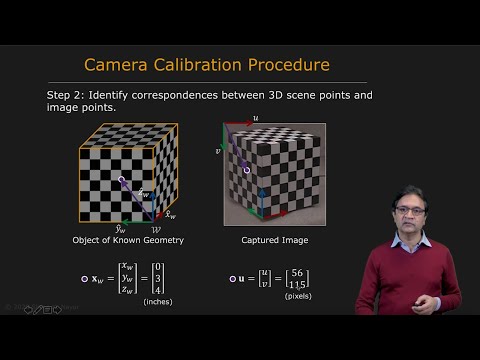
In this video 📝 We'll talk about Stereo Vision Camera Calibration in Python with OpenCV. First, we will talk about what camera calibration is and how to do it. I'll provide all the scripts in my GitHub so you can calibrate your own cameras for stereo vision. We will go over the whole calibration process and see what the OpenCV methods do. At the end of the video, we will see the calibration results after undistorting and rectifying our images.
If you enjoyed this video, be sure to press the 👍 button so that I know what content you guys like to see.
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
📷 Calibrator 📷
My camera calibration software, CharuCo Boards, and Checker boards
_____________________________________________________________
📞 Connect with Me:
_____________________________________________________________
🎮 My Gear (Affiliate links):
🖥️ Desktop PC:
_____________________________________________________________
Timestamps:
0:00 - Introduction
3:37 - Generate Chessboard Images
7:56 - Stereo Camera Calibration
22:15 - Undistort and Rectify Stereo Camera
Tags:
#CameraCalibration #StereoCalibration #OpenCV #CameraCalibrationOpenCV #CameraDistortion #ComputerVision
 0:27:11
0:27:11
Stereo Vision Camera Calibration with OpenCV: How to Calibrate your Camera with Python Script
 0:16:34
0:16:34
Simple Stereo | Camera Calibration
 0:03:24
0:03:24
Nerian Vision - 3D Stereo Vision Calibration Tutorial
 0:14:24
0:14:24
OpenCV Python Camera Calibration (Intrinsic, Extrinsic, Distortion)
 0:04:59
0:04:59
SP1 Stereo Camera Calibration Walkthrough
 0:05:52
0:05:52
Camera Calibration with MATLAB
 0:05:18
0:05:18
Camera Calibration in less than 5 Minutes with OpenCV
 0:00:54
0:00:54
Stereo Camera Calibration by Detecting Chessboard Corners (Project SAHE)
 0:07:45
0:07:45
Stereo calibration with MVTec HALCON
 0:00:43
0:00:43
Distance Measurement With a Stereo Camera using Python and OpenCV
 0:03:11
0:03:11
Overview | Camera Calibration
 0:00:16
0:00:16
Stereo Depth with 2 Cameras using OpenCV
 0:19:58
0:19:58
Stereo Vision | Student Competition: Computer Vision Training
 0:20:32
0:20:32
2020 - machine vision, camera calibration, stereo vision, video stabilization, video analytic
 0:02:49
0:02:49
NI Vision: Calibrate Stereo Cameras
 0:12:56
0:12:56
Stereo Camera Calibration in MATLAB with Steps and Example
 0:04:28
0:04:28
Automatic Camera Re-Calibration for Robust Stereo Vision
 0:23:05
0:23:05
How to do Stereo Vision and Depth Estimation with OpenCV C++ and Python
 0:00:48
0:00:48
Automated Camera Calibration
 0:07:47
0:07:47
Camera Calibration | Camera Calibration
 0:02:26
0:02:26
SP1 Real-Time Stereo Vision System
 0:12:34
0:12:34
Depth Camera - Computerphile
 0:32:13
0:32:13
Building a Depth Estimation System with Stereo Vision and OpenCV C++
 0:05:01
0:05:01
Stereo Camera Calibration with ROS and OpenCV
Комментарии