filmov
tv
Learn Camera Calibration in OpenCV with Python Script

Показать описание
You will also get access to all the technical courses inside the program, also the ones I plan to make in the future! Check out the technical courses below 👇
_____________________________________________________________
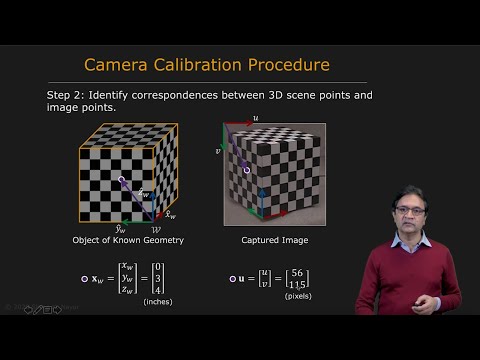
In this video 📝 We'll talk about Camera Calibration and Geometry. We will first talk about the basics of camera geometry and how it can be used for calibrating cameras. We will see different types of distortion on cameras and images. At the end of the video, I'll show you in a Python script how to apply what we have learned and calibrate a camera from a practical computer vision setup.
If you enjoyed this video, be sure to press the 👍 button so that I know what content you guys like to see.
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
📷 Calibrator 📷
My camera calibration software, CharuCo Boards, and Checker boards
_____________________________________________________________
📞 Connect with Me:
_____________________________________________________________
🎮 My Gear (Affiliate links):
🖥️ Desktop PC:
_____________________________________________________________
Tags:
#CameraCalibration #CameraCalibrationOpenCV #CameraDistortion #ComputerVision #OpenCV #python
 0:28:49
0:28:49
Learn Camera Calibration in OpenCV with Python Script
 0:05:18
0:05:18
Camera Calibration in less than 5 Minutes with OpenCV
 0:04:28
0:04:28
Camera Calibration using OpenCV
 0:14:24
0:14:24
OpenCV Python Camera Calibration (Intrinsic, Extrinsic, Distortion)
 0:21:24
0:21:24
Camera Calibration with OpenCV Python: Part 5 | Basic AR Course
 0:00:10
0:00:10
Camera Calibration using OpenCV
 0:32:05
0:32:05
Advanced Camera Calibration Technique with C++ and OpenCV: A Practical Guide
 0:07:47
0:07:47
Camera Calibration | Camera Calibration
 0:27:11
0:27:11
Stereo Vision Camera Calibration with OpenCV: How to Calibrate your Camera with Python Script
 0:07:37
0:07:37
OpenCV 3 – Advanced Topics in CVAP : Calibrating a Camera | packtpub.com
 0:05:48
0:05:48
Camera Calibration OOP Class [OpenCV Python]
 0:00:11
0:00:11
Camera Calibration using OpenCV in Python to Remove Distortion in Images
 0:02:44
0:02:44
OpenCV Basics - 14 - Camera Calibration Part 1
 0:00:50
0:00:50
How to calibrate OpenCV Camera
 0:00:08
0:00:08
openCV camera calibration
 0:04:07
0:04:07
Camera Calibration by OpenCV using Jupyter Lab + Source Code
 0:03:40
0:03:40
Camera Calibration with rings pattern and OpenCV
 0:12:59
0:12:59
OpenCV Basics - 18 - Camera Calibration Part 4
 0:00:20
0:00:20
OpenCV camera calibration
 0:00:30
0:00:30
OpenCV Camera Calibration from Google Colab Using Chessboard image
 0:05:19
0:05:19
Camera Calibration Using OpenCV with source code
 0:10:50
0:10:50
Calibrate a Camera In Under 5 Minutes (2020)
 0:01:00
0:01:00
OpenCV Calibration And Undistort
 0:04:49
0:04:49
Camera calibration using OpenCV
Комментарии