filmov
tv
Nonlinear control systems - 3.1. LaSalle's Invariance Principle

Показать описание
Lecture 3.1: LaSalle's Theorem
0:00 Introduction
0:19 Motivation
1:02 Positively invariant sets
1:13 Example 1
1:58 Example 2
2:46 LaSalle's Invariance Principle
3:27 Example 3: Pendulum with friction
7:05 Example 4: Mass-spring-damper
9:00 Lyapunov vs LaSalle's Theorem
0:00 Introduction
0:19 Motivation
1:02 Positively invariant sets
1:13 Example 1
1:58 Example 2
2:46 LaSalle's Invariance Principle
3:27 Example 3: Pendulum with friction
7:05 Example 4: Mass-spring-damper
9:00 Lyapunov vs LaSalle's Theorem
 0:10:24
0:10:24
Nonlinear control systems - 3.1. LaSalle's Invariance Principle
 0:00:28
0:00:28
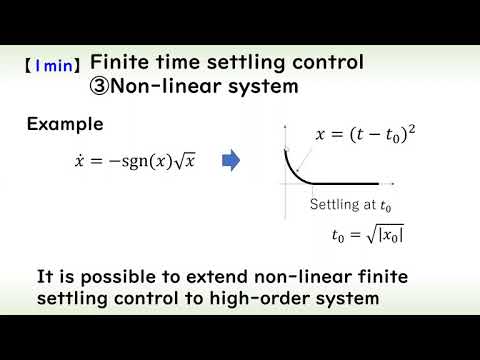
(Control engineering) Finite time settling control 3 nonlinear (1 minute explanation)
 0:12:03
0:12:03
Nonlinear control systems - 1.3. Stability definition - Part 1
 0:01:57
0:01:57
How to Distinguish Between Linear & Nonlinear : Math Teacher Tips
 1:09:11
1:09:11
Lecture 3 Nonlinear Control System
 0:22:42
0:22:42
Introduction To Nonlinear Systems
 0:14:55
0:14:55
Why study nonlinear control?
 1:27:42
1:27:42
Nonlinear Control part 1
 1:17:43
1:17:43
ASEN 6024: Nonlinear Control Systems - Sample Lecture
 0:06:24
0:06:24
Nonlinear control systems - 1.2. Equilibrium points
 1:18:33
1:18:33
ASEN 5024 Nonlinear Control Systems
 0:00:46
0:00:46
Day in My Life as a Quantum Computing Engineer!
 0:13:25
0:13:25
Linear and Non-Linear Systems
 0:12:31
0:12:31
Nonlinear control systems - 2.4. Lyapunov Stability Theorem
 0:10:05
0:10:05
Solved Examples - I | Krasovskii's Theorem & Sign Definiteness | Nonlinear Control Systems
 0:16:08
0:16:08
Everything You Need to Know About Control Theory
 0:08:03
0:08:03
Nonlinear control systems - 1.1. Modelling representations
 0:10:21
0:10:21
Nonlinear control systems - 3.3. Global stability
 1:51:48
1:51:48
Conference on Perspectives in Nonlinear Dynamics #Day 3 (1 of 4)
 0:07:27
0:07:27
Linear vs Non - Linear Control Systems | With Examples | Simplified KTU EC 409
 0:24:45
0:24:45
Nonlinear Control of Inverted Pendulum on Cart (Feedback Linearization)
 0:16:47
0:16:47
Control of a first order nonlinear system
 0:01:02
0:01:02
(Control engineering) Feedback linearization of non-linear system (1 minute explanation)
 0:12:23
0:12:23
Non linear control system using fractional calculus
Комментарии