filmov
tv
Nonlinear control systems - 3.3. Global stability

Показать описание
Lecture 4.1: Global stability
0:00 Introduction
0:19 Global stability definition
1:31 Example 1
2:16 Example 2
3:52 Global stability conditions
4:44 Example 3
6:44 Radial unboundedness
7:11 Example 3 (cont.)
7:52 Example 4
8:37 Global asymptotic stability theorem
9:27 Example 5
0:00 Introduction
0:19 Global stability definition
1:31 Example 1
2:16 Example 2
3:52 Global stability conditions
4:44 Example 3
6:44 Radial unboundedness
7:11 Example 3 (cont.)
7:52 Example 4
8:37 Global asymptotic stability theorem
9:27 Example 5
 0:10:21
0:10:21
Nonlinear control systems - 3.3. Global stability
 0:10:24
0:10:24
Nonlinear control systems - 3.1. LaSalle's Invariance Principle
 0:00:28
0:00:28
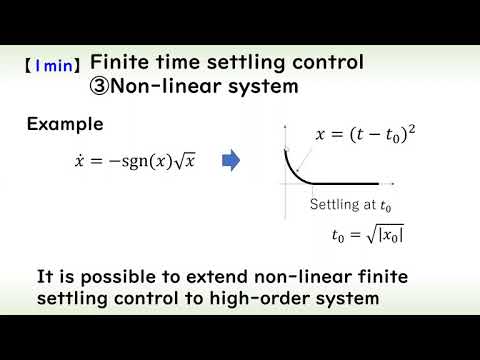
(Control engineering) Finite time settling control 3 nonlinear (1 minute explanation)
 1:09:11
1:09:11
Lecture 3 Nonlinear Control System
 0:06:24
0:06:24
Nonlinear control systems - 1.2. Equilibrium points
 0:00:16
0:00:16
This chapter closes now, for the next one to begin. 🥂✨.#iitbombay #convocation
 0:29:46
0:29:46
Session 10: Control Systems 3 - Nonlinear Optimal Control via Occupation ...
 0:11:27
0:11:27
Nonlinear control, lecture 4, part 3: Equilibrium points for a pendulum
 0:19:44
0:19:44
Nonlinear control systems _ Describing Function (part 3)
 0:15:40
0:15:40
Nonlinear Control - Lecture 3: Pendulum modelling using Lagrange method, part 1
 0:06:51
0:06:51
Nonlinear control systems - 3.2. Region of attraction
 0:14:55
0:14:55
Why study nonlinear control?
 0:08:34
0:08:34
Nonlinear control
 0:17:26
0:17:26
Nonlinear System Identification | System Identification, Part 3
 0:01:57
0:01:57
How to Distinguish Between Linear & Nonlinear : Math Teacher Tips
 1:17:43
1:17:43
ASEN 6024: Nonlinear Control Systems - Sample Lecture
 0:05:28
0:05:28
Nonlinear Control - Lecture 3: Pendulum modelling using Lagrange method, part 2
 0:00:46
0:00:46
Day in My Life as a Quantum Computing Engineer!
 0:08:02
0:08:02
NONLINEAR EE601 CONTROL SYSTEM limit cycle EE 2018 3
 1:18:33
1:18:33
ASEN 5024 Nonlinear Control Systems
 0:12:31
0:12:31
Nonlinear control systems - 2.4. Lyapunov Stability Theorem
 0:09:42
0:09:42
Applied Nonlinear Dynamics and Nonlinear Control (ANDNC) Lecture 3
 0:00:15
0:00:15
Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy
 1:42:39
1:42:39
Learning and Control with Safety and Stability Guarantees for Nonlinear Systems -- Part 3 of 4
Комментарии