filmov
tv
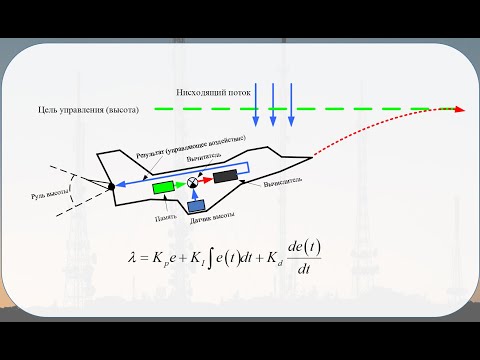
ПИ, ПИД-регулятор и автоматика

Показать описание
Основа основ почти всей техники. Немного теории и яркие примеры
 0:13:21
0:13:21
ПИ, ПИД-регулятор и автоматика
 0:13:20
0:13:20
ПИД регулятор - принцип работы.
 0:10:44
0:10:44
О PID регуляторе простым языком (что такое ПИДы)
 0:07:04
0:07:04
Что такое регуляторы, какие они бывают, как настраиваются, ПИД регуляторы...
 0:28:57
0:28:57
Уроки Ардуино. ПИД регулятор
 0:06:16
0:06:16
Как влияют параметры ПИД-регулятора на процесс? Ответ на вопрос 4...
 0:13:53
0:13:53
Непрерывные законы регулирования
 0:07:40
0:07:40
Настройка ПИД регулятора на практике
 0:04:29
0:04:29
Перевод RealPars 33 - ПИД-регулирование. Часть 1
 0:11:42
0:11:42
Настройка ПИД регуляора по виду переходного процесса, моя пошаговая методика...
 0:08:25
0:08:25
Перевод RealPars 35 - ПИД-регулирование. Часть 3
 0:15:21
0:15:21
Автоматические регуляторы
 0:20:45
0:20:45
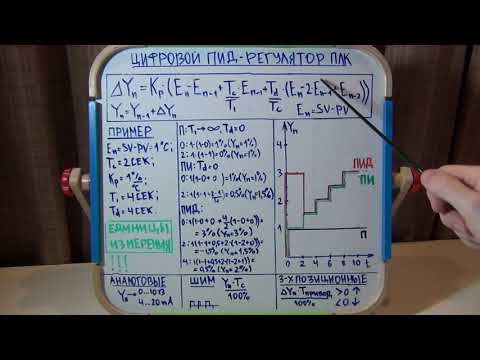
Цифровой ПИД регулятор для ПЛК. Подробный разбор
 0:06:49
0:06:49
Урок 22. ПИД-регулятор (И-регулятор, настройка регулятора, применение на практике) для Arduino...
 0:17:38
0:17:38
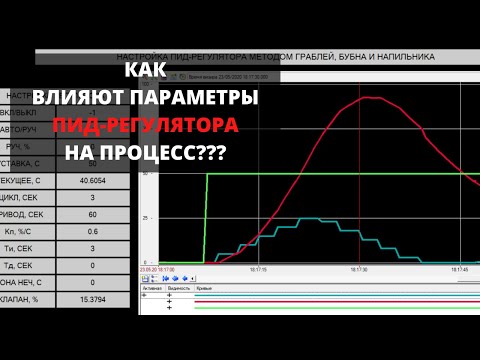
Настройка ПИД регулятора методом граблей, бубна и напильника...
 0:06:26
0:06:26
Сравниваем старые и новые двухпозиционные и ПИД-регуляторы ОВЕН ТРМ-У2...
 0:02:35
0:02:35
№25 PLR Studio. Настройка PI-регулятора
 0:10:32
0:10:32
Простейшее управление Часть 2 П - регулятор
 0:16:31
0:16:31
Теория автоматического управления. Лекция 16. Настройка ПИД-регулятора...
 1:21:47
1:21:47
Вебинар «ПИД – регулятор в программируемых реле ОВЕН ПР»...
 0:46:49
0:46:49
Основы теории автоматического управления. ПИД-регулятор...
 0:00:58
0:00:58
Чем отличается ПИД регулятор от термоконтроллера?
 0:04:39
0:04:39
Настройка ПИД регулятора балансирующего робота
 0:08:09
0:08:09
Урок 20. П-регулятор (за что он отвечает, настройка регулятора, применение на практике) для Arduino...
Комментарии