filmov
tv
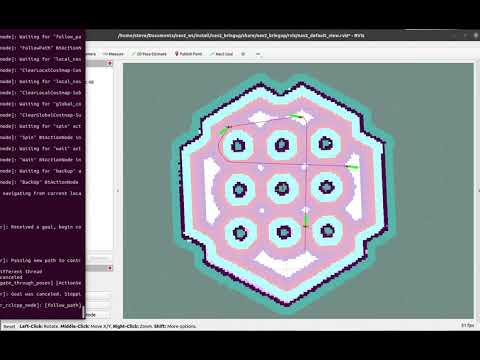
ROS2 Nav2 Integration : Understanding YAML Parameters for Planners, Costmaps, and Velocities

Показать описание
Solving integration issues with ROS2 Nav2 in autonomous robot simulations. Lets discuss intricacies of YAML parameters for planners, costmaps, and speeds. We demonstrate ways to handle common problems like robot recovery behaviors and speed-related planning failures.
💾 Github :
🤓 Lets join on Discord :
🖐My Social Profiles :
#ros2 #robotics #gazebo #nav2 #autonomousrobot #SLAM
💾 Github :
🤓 Lets join on Discord :
🖐My Social Profiles :
#ros2 #robotics #gazebo #nav2 #autonomousrobot #SLAM
 0:08:09
0:08:09
ROS2 Nav2 Integration : Understanding YAML Parameters for Planners, Costmaps, and Velocities
 0:00:47
0:00:47
ROS2 Nav2 Integration : Understanding YAML Parameters for Planners, Costmaps, and Velocities
 1:01:27
1:01:27
ROS2 Nav2 - Navigation Stack in 1 Hour [Crash Course]
 0:06:16
0:06:16
Understanding Autonomous Navigation in ROS2: Mapping, Planning, and Execution
 0:13:31
0:13:31
ROS 2 Navigation - Part 2 (ROS 1 Vs ROS 2 Nav Design in detail)
 0:22:39
0:22:39
Making robot navigation easy with Nav2 and ROS!
 0:15:20
0:15:20
ROS2 Nav2 - Generate a Map with slam_toolbox
 0:00:22
0:00:22
Nav2: Basic 'Navigate Through Poses' Demo
 0:29:26
0:29:26
Nav 2 in ROS 2 for autonomous Navigation using SLAM for Indoor Mobile Robots
 0:00:30
0:00:30
NeuronBot Avoids Dynamic Obstacle Immediately with ROS 2 Navigation
 0:13:48
0:13:48
ROS 2 Navigation - Part 3 (creating Nav2 Simple demo with TurtleBot3)
 0:01:00
0:01:00
Marathon2: Testing robustness of ROS2 Navigation2
 0:44:14
0:44:14
ROSConFr 2023 - Keynote - Nav2 Whys Over Whats Navigating the Philosophies Behind the Feature
 0:00:40
0:00:40
Nav 2 in ROS 2 for autonomous Navigation using SLAM for Indoor Mobile Robots
 0:08:19
0:08:19
ROS 2 Navigation - Part 1 (Basic Navigation Concepts)
 0:00:25
0:00:25
ROS2 Navigation2 Speed Limit Zones Demo
 0:00:31
0:00:31
ROS2 Nav2: Shelf Inspection Demonstration with Keep-Out Zones
 0:19:56
0:19:56
ROS2 Occupancy Grid Node for Nav2
 0:00:14
0:00:14
20191226 NeuronBot2 runs Nav2 purely on ROS2
 0:00:16
0:00:16
Robotic Operating System and navigation #ros2 #nav2 #foxy
 0:50:19
0:50:19
Practical Demonstration of New User-Requested Nav2 Features | Steve Macenski | ROSDevDay 2021
![[ROS2 Q&A] 232](https://i.ytimg.com/vi/KIbgZqfppAI/hqdefault.jpg) 0:31:47
0:31:47
[ROS2 Q&A] 232 - How to follow waypoints using nav2
 0:00:38
0:00:38
ROS2 Unity Nav2 Example
 0:00:58
0:00:58
ElsaBot Jeep with ROS Nav2 Navigation
Комментарии