filmov
tv
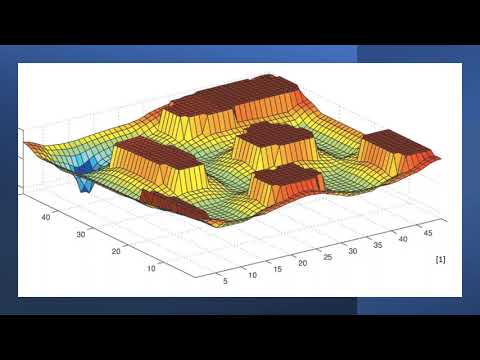
Rover Navigation Demonstration - Potential Fields Method in Python
Показать описание
APSC103 Final Presentation - Simulated demonstration of potential fields autonomous navigation code in Gazebo
Mira Torbay
Рекомендации по теме
0:00:47
Rover Navigation Demonstration - Potential Fields Method in Python
0:00:48
Rover Obstacle Navigation and Manipulator Positioning Using Artificial Potential Fields
0:06:37
Machine Learning based Path Planning for Improved Rover Navigation (FY20 Final Presentation)
0:20:28
Planetary Rovers - Rover Path Planning - Path planning by potential field
0:09:14
Investigating the Performance of LCNS with Visual-Inertial Odometry for Lunar Rover Navigation
0:00:14
Shape-Shifting Wheel for Advanced Rover Mobility | Final Prototype Demonstration
0:06:04
Fit A Tracker Into Any Car Super Easy - Modernising My Rover 75
0:00:10
Mini Lunar Rover CADRE Undergoes Testing In JPL's Mars Yard
0:01:00
Mars Rover Manipal #shorts
0:00:24
Massive Upgrade Land Rover Defender Wireless CarPlay KENWOOD DMX8021DABS #landroverdefender #cars
0:04:40
How to set the sat nav in a 2008 Land Rover Discovery 3
0:00:09
Perseverance Rover View #mars #shorts
0:00:21
Land Rover Discovery Sport 2016 - Android software on the factory touch screen
0:03:20
Mars Rover Curiosity - Autonomous Navigation (Sols 388-440)
0:01:18
Land Rover secret menu 2010-2012
0:00:06
Mars perseverance Rover sol371#mars#shortvideo #viral #mars4kstunningvideo
0:17:56
Range Rover L322 SatNav - Map updates / Navigation DVD location
0:16:30
Update Map data on Range Rover L405 SatNav Navigation Software - not easy !
0:31:36
Mars Unveiled: Perseverance Rover's Jaw-Dropping Finds!
0:00:53
SCISYS Autonomous Rover Navigation
0:00:33
NASA's Mars Perseverance Rover On Sol 213 (Sept. 25, 2021) Video 9 #shorts
0:00:06
perseverance Mars Rover #shorts #viral #shortsfeed #youtubeshorts #shortvideo
0:19:42
The Insane Engineering of the Perseverance Rover
0:00:05
Mars Curiosity Rover Sees Streaks and Specks During 2024 Solar Storm

 0:00:47
0:00:47
 0:00:48
0:00:48
 0:06:37
0:06:37
 0:20:28
0:20:28
 0:09:14
0:09:14
 0:00:14
0:00:14
 0:06:04
0:06:04
 0:00:10
0:00:10
 0:01:00
0:01:00
 0:00:24
0:00:24
 0:04:40
0:04:40
 0:00:09
0:00:09
 0:00:21
0:00:21
 0:03:20
0:03:20
 0:01:18
0:01:18
 0:00:06
0:00:06
 0:17:56
0:17:56
 0:16:30
0:16:30
 0:31:36
0:31:36
 0:00:53
0:00:53
 0:00:33
0:00:33
 0:00:06
0:00:06
 0:19:42
0:19:42
 0:00:05
0:00:05