filmov
tv
Planetary Rovers - Rover Path Planning - Path planning by potential field
Показать описание
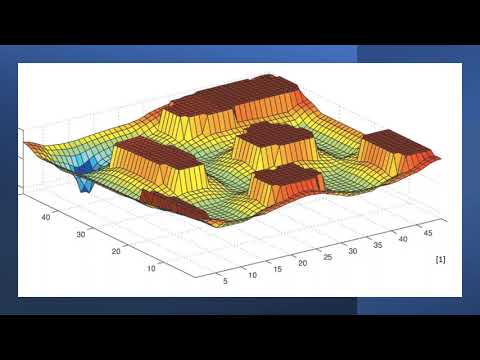
Path planning is a crucial part for every mobile robot. This video gives a small overview about the Potential Field Method for path planning.
Most of the information is from the book "Planetary Rovers - Robotic Exploration of the Solar Systems" by A. Ellery and published by Springer.
The video consists of two main parts. In the first part, some basic information about the potential field method is presented
(namely: basic principle, advantages and disadvantages, basic math, handling and avoiding local minima). In the second part, two simulations are
shown as examples for potential field implementations.
Tools used in this video:
Most of the information is from the book "Planetary Rovers - Robotic Exploration of the Solar Systems" by A. Ellery and published by Springer.
The video consists of two main parts. In the first part, some basic information about the potential field method is presented
(namely: basic principle, advantages and disadvantages, basic math, handling and avoiding local minima). In the second part, two simulations are
shown as examples for potential field implementations.
Tools used in this video:
 0:20:43
0:20:43
 0:22:05
0:22:05
 0:23:26
0:23:26
 0:24:25
0:24:25
 0:05:58
0:05:58
 0:17:35
0:17:35
 0:05:12
0:05:12
 2:12:37
2:12:37
 0:02:20
0:02:20
 0:09:01
0:09:01
 0:02:11
0:02:11
 0:01:47
0:01:47
 0:14:02
0:14:02
 0:23:27
0:23:27
 0:14:15
0:14:15
 0:06:48
0:06:48
 0:25:45
0:25:45
 0:17:54
0:17:54
 0:20:11
0:20:11
 0:20:40
0:20:40
 0:09:03
0:09:03
 0:03:11
0:03:11
 0:02:56
0:02:56