filmov
tv
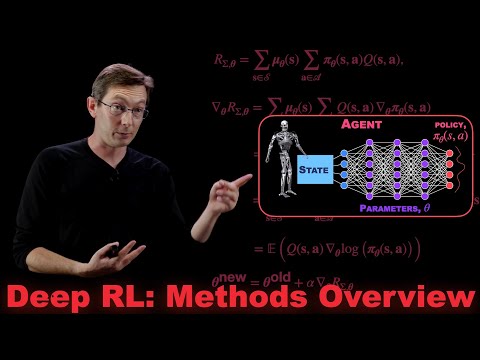
Overview of Deep Reinforcement Learning Methods

Показать описание
This video gives an overview of methods for deep reinforcement learning, including deep Q-learning, actor-critic methods, deep policy networks, and policy gradient optimization algorithms.
This is a lecture in a series on reinforcement learning, following the new Chapter 11 from the 2nd edition of our book "Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control" by Brunton and Kutz
This video was produced at the University of Washington
This is a lecture in a series on reinforcement learning, following the new Chapter 11 from the 2nd edition of our book "Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control" by Brunton and Kutz
This video was produced at the University of Washington
 0:24:50
0:24:50
Overview of Deep Reinforcement Learning Methods
 1:07:30
1:07:30
MIT 6.S091: Introduction to Deep Reinforcement Learning (Deep RL)
 0:36:26
0:36:26
A friendly introduction to deep reinforcement learning, Q-networks and policy gradients
 0:21:15
0:21:15
Deep Reinforcement Learning: Neural Networks for Learning Control Laws
 0:16:27
0:16:27
An introduction to Reinforcement Learning
 0:19:50
0:19:50
An introduction to Policy Gradient methods - Deep Reinforcement Learning
 0:25:29
0:25:29
Introduction to Deep Reinforcement Learning
 0:02:28
0:02:28
Reinforcement Learning Basics
 0:00:23
0:00:23
UP POLICE CONSTABLE PYQ ❓🔥#uppolice #uppolicemath #mathtricks #mathshortcuts #maths @mathsabhyudaya...
 0:22:15
0:22:15
Introduction to Deep Reinforcement Learning | Deep RL Course
 0:21:37
0:21:37
Reinforcement Learning Series: Overview of Methods
 0:08:56
0:08:56
Introduction to Reinforcement Learning | Scope of Reinforcement Learning by Mahesh Huddar
 0:05:52
0:05:52
Deep Learning | What is Deep Learning? | Deep Learning Tutorial For Beginners | 2023 | Simplilearn
 0:57:55
0:57:55
MIT 6.S094: Deep Reinforcement Learning
 1:25:18
1:25:18
Introduction of Deep Reinforcement Learning
 0:01:07
0:01:07
Deep Reinforcement Learning Nanodegree Program
 0:18:40
0:18:40
But what is a neural network? | Chapter 1, Deep learning
 0:54:34
0:54:34
Introduction to Deep Reinforcement Learning
 1:00:19
1:00:19
MIT 6.S191: Reinforcement Learning
 0:57:33
0:57:33
MIT 6.S191 (2023): Reinforcement Learning
 0:20:56
0:20:56
Deep Reinforcement Learning Tutorial for Python in 20 Minutes
 0:06:48
0:06:48
Q-Learning Explained - Reinforcement Learning Tutorial
 0:55:13
0:55:13
An Introduction to Deep Reinforcement Learning
 0:11:28
0:11:28
Reinforcement Learning: Crash Course AI #9
Комментарии