filmov
tv
Reinforcement Learning - My Algorithm vs State of the Art

Показать описание
In this 3rd video about inverted pendulum balancing with AI, I compare the results I had with my own algorithm with a state of the art reinforcement learning algorithm using Isaac Lab, which is part of the NVidia omniverse platform.
PC Specs:
i7 -12700K
RTX 4090
32GB memory
PC Specs:
i7 -12700K
RTX 4090
32GB memory
 0:19:32
0:19:32
Reinforcement Learning - My Algorithm vs State of the Art
 0:08:25
0:08:25
Reinforcement Learning from scratch
 0:01:00
0:01:00
The Magic of Reinforcement Learning with Human Feedback RLHF
 0:00:10
0:00:10
Reinforcement Learning Live Example With My Baby 👶👶👶
 0:11:29
0:11:29
Reinforcement Learning from Human Feedback (RLHF) Explained
 0:12:16
0:12:16
Does your PPO agent fail to learn?
 0:00:40
0:00:40
Solving a Maze with Reinforcement Learning
 0:18:02
0:18:02
Reinforcement Learning with Human Feedback (RLHF), Clearly Explained!!!
 0:19:52
0:19:52
DAY 12 | ARTIFICIAL INTELLIGENCE AND APPLICATIONS | VI SEM | BCA | LEARNING MACHINE LEARNING | L2
 0:18:19
0:18:19
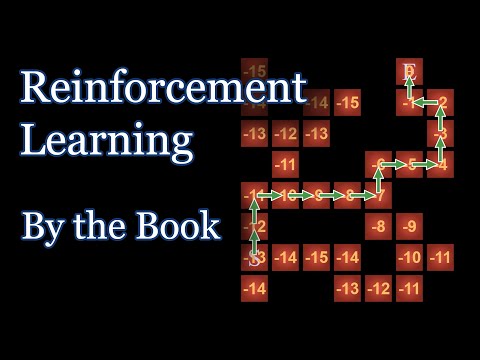
Reinforcement Learning, by the Book
 0:09:44
0:09:44
Actor Critic Algorithms
 0:00:55
0:00:55
Not enough data for deep learning? Try this with your #Python code #shorts
 0:06:16
0:06:16
How to Choose an Appropriate Deep RL Algorithm for Your Problem
 0:41:04
0:41:04
Reinforcement learning for 10 years old | reinforcement learning python | reinforcement learning ML
 0:14:47
0:14:47
Reinforcement Learning: on-policy vs off-policy algorithms
 0:00:25
0:00:25
Reinforcement learning with my Eat Melon Demo!
 0:00:41
0:00:41
What is Reinforcement Learning? #shorts
 0:20:41
0:20:41
Training an unbeatable AI in Trackmania
 0:00:48
0:00:48
Andrew Ng's Secret to Mastering Machine Learning - Part 1 #shorts
 0:25:57
0:25:57
The Full Reinforcement Learning Iceberg
 0:17:52
0:17:52
Reinforcement Learning Policies and Learning Algorithms
 0:21:33
0:21:33
Bellman Equations, Dynamic Programming, Generalized Policy Iteration | Reinforcement Learning Part 2
 0:18:13
0:18:13
Reinforcement Learning: Essential Concepts
 1:07:30
1:07:30
MIT 6.S091: Introduction to Deep Reinforcement Learning (Deep RL)
Комментарии