filmov
tv
Object Sorting using Robotic Arm and Image Processing | Raspberry Pi | Arduino | OpenCV

Показать описание
##Raspberry Pi + Arduino + Robotic Arm
Title: Object Sorting Using Raspberry Pi, Arduino, and Robotic Arm
## Overview:
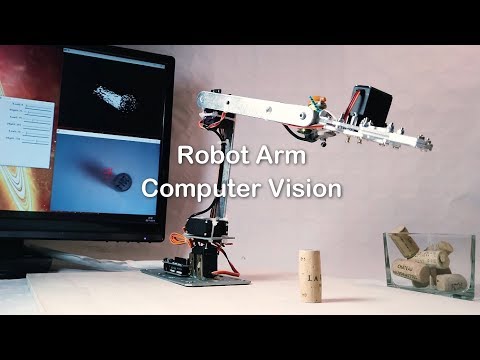
In this project, we use a combination of Raspberry Pi, Arduino, and a robotic arm to sort objects based on their color. The entire system involves image processing, color detection, and servo motor control to achieve precise object sorting.
### Key Steps:
## 1. Object Placement:
Objects are positioned between the clamps in front of a camera. The robotic arm, controlled by the Raspberry Pi, will sort them at three different angles: 90, 180, and 270 degrees. A USB camera continuously scans the live feed for colored objects.
## 2. Color Detection:
Raspberry Pi performs color detection using image processing. The current project recognizes Red, Green, and Yellow colors. Modification of the code allows for the addition of more colors.
## 3. Communication Between Raspberry Pi and Arduino:
The Raspberry Pi communicates with an Arduino Uno board using two jumper wires. This two-bit communication method sends information to the Arduino, representing colors with binary numbers. For instance, Red is represented as 10, Green as 01, and Blue as 11, where 1 is HIGH (5 volts) and 0 is LOW (0 volts).
## 4. Wiring Setup:
Jumper wires connect GPIO pins (11 and 13) of the Raspberry Pi to two digital pins (6 and 7) on the Arduino.
## 5. Robotic Arm Operation:
The robotic arm performs sorting operations based on detected colors. The Arduino controls three servo motors and the motor controlling the clamp.
### Hardware Used:
1. Raspberry Pi 2
2. Arduino Uno
3. USB Camera
4. Motor Control I.C. (for the robotic arm clamp)
5. Three Servo Motors
### Software Used:
1. Python
2. OpenCV
3. Arduino (code)
4. NumPy
## How to Run the Robot:
1. Ensure the two jumper cables are correctly connected to the desired pins, as indicated in the source code.
2. Connect a 5V DC supply to power the motors.
## Additional Information:
Title: Object Sorting Using Raspberry Pi, Arduino, and Robotic Arm
## Overview:
In this project, we use a combination of Raspberry Pi, Arduino, and a robotic arm to sort objects based on their color. The entire system involves image processing, color detection, and servo motor control to achieve precise object sorting.
### Key Steps:
## 1. Object Placement:
Objects are positioned between the clamps in front of a camera. The robotic arm, controlled by the Raspberry Pi, will sort them at three different angles: 90, 180, and 270 degrees. A USB camera continuously scans the live feed for colored objects.
## 2. Color Detection:
Raspberry Pi performs color detection using image processing. The current project recognizes Red, Green, and Yellow colors. Modification of the code allows for the addition of more colors.
## 3. Communication Between Raspberry Pi and Arduino:
The Raspberry Pi communicates with an Arduino Uno board using two jumper wires. This two-bit communication method sends information to the Arduino, representing colors with binary numbers. For instance, Red is represented as 10, Green as 01, and Blue as 11, where 1 is HIGH (5 volts) and 0 is LOW (0 volts).
## 4. Wiring Setup:
Jumper wires connect GPIO pins (11 and 13) of the Raspberry Pi to two digital pins (6 and 7) on the Arduino.
## 5. Robotic Arm Operation:
The robotic arm performs sorting operations based on detected colors. The Arduino controls three servo motors and the motor controlling the clamp.
### Hardware Used:
1. Raspberry Pi 2
2. Arduino Uno
3. USB Camera
4. Motor Control I.C. (for the robotic arm clamp)
5. Three Servo Motors
### Software Used:
1. Python
2. OpenCV
3. Arduino (code)
4. NumPy
## How to Run the Robot:
1. Ensure the two jumper cables are correctly connected to the desired pins, as indicated in the source code.
2. Connect a 5V DC supply to power the motors.
## Additional Information:
 0:01:02
0:01:02
Pick and place Robotic arm intended for object sorting task.
 0:01:17
0:01:17
Object sorting system
 0:06:24
0:06:24
TensorFlow, OpenCV & custom Dobot APIs for sorting raw & ripe tomatoes using Deep Learning R...
 0:00:37
0:00:37
Recycling Sorting Robotic Arm Demo
 0:02:45
0:02:45
Object Sorting with Ned Robot Arm - Proof of Concept
 0:00:54
0:00:54
Color-Sorting Robotic Arm using AI 【 Zeal 】
 0:00:39
0:00:39
Object Sorting using Robotic Arm and Image Processing | Raspberry Pi | Arduino | OpenCV
 0:01:21
0:01:21
Object sorting using 3 axis robotic arm
 0:01:15
0:01:15
G.R.A.S.P. (Grab Recognize Automate Sort Precision) - Our Automatic Sorting Robot project
 0:00:24
0:00:24
COLOR SORTER CONVEYOR SYSTEM
 0:00:18
0:00:18
StudentProject - Robot Arm Technical Vision / Python / OpenCV Raspberry Pi / 4 / 6 DoF
 0:01:33
0:01:33
Object Sorting System using Robotic ARM
 0:01:12
0:01:12
Object sorting using Image Processing with Raspberry pi 3 and robotic arm.
 0:00:59
0:00:59
Automatic Sorter Pick & Place Arduino Based 4 DOF Robot Arm
 0:00:44
0:00:44
A demo of agriculture robot. Robotic arm + Raspberry PI + Python + OpenCV.
 0:01:12
0:01:12
Self Object Recognizing & Color Sorting Robotic Arm
 0:00:13
0:00:13
Smart 5 DOF Robotic Arm with Autonomous Sorting using Machine Vision (Object #1 - Ping-pong ball)
 0:00:58
0:00:58
Color Sorter Machine with Robotic Arm - Arduino Project
 0:05:34
0:05:34
SORTING TOMATOES BASED ON SIZE AND COLOR USING TENSORFLOW AND ARDUINO
 0:01:42
0:01:42
RoboArm + conveyor on Arduino
 0:15:50
0:15:50
Sorting of objects based on their color using a robotic arm in WEBOTS Software
 0:01:54
0:01:54
Smart Robotic Arm Picking and Placing with automatic sorting of different objects
 0:00:12
0:00:12
Smart 5 DOF Robotic Arm with Autonomous Sorting using Machine Vision (Object #2 - Raspberry Pi box)
 0:01:32
0:01:32
Arduino Robot arm with Computer Vision
Комментарии