filmov
tv
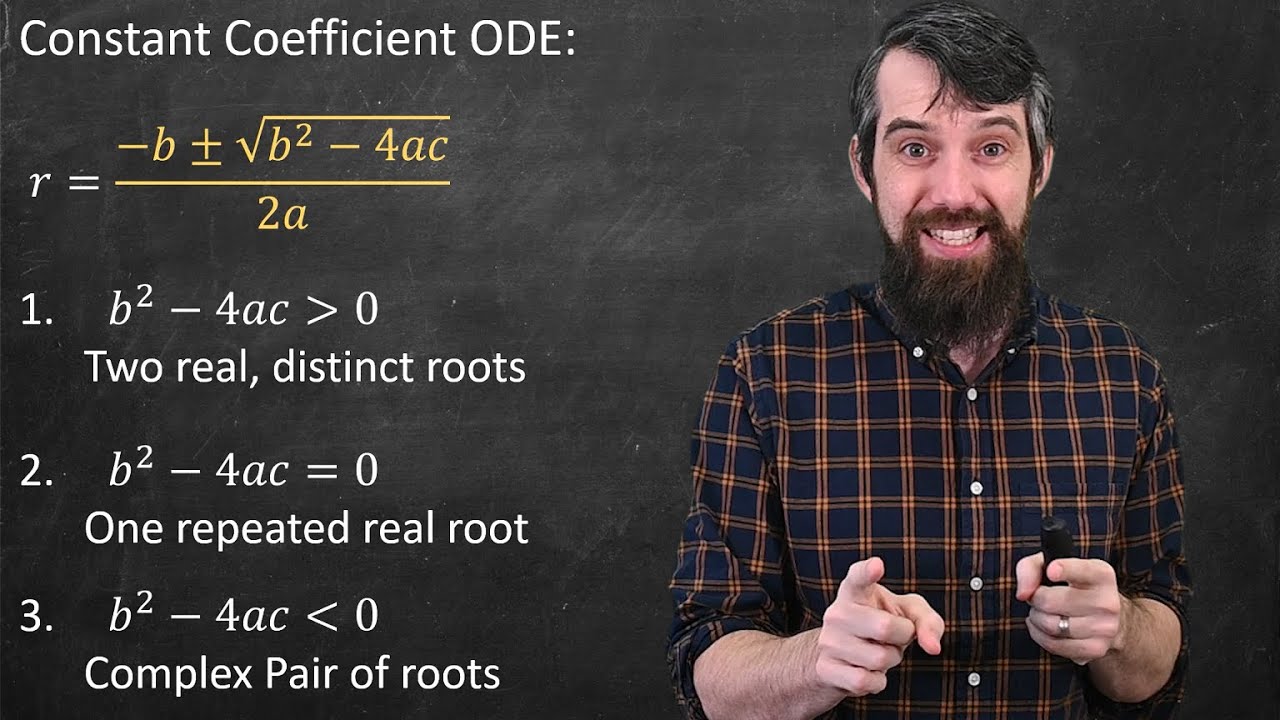
Constant Coefficient ODEs: Real & Distinct vs Real & Repeated vs Complex Pair
Показать описание
While we saw a specific example of Constant Coefficient Homogeneous ODEs in my previous video in the playlist, in this video we're going to solve it in generality and really elaborate on the three main cases. The characteristic equation aka auxiliary equation can have either real and distinct root, real and repeated roots, or complex conjugates. Each of these three cases has a specific form of the solution to the differential equation.
0:00 Characteristic Equation
1:50 Three Cases
4:00 Real Distinct Roots
4:24 Real Repeated Roots
6:19 Complex Roots
OTHER COURSE PLAYLISTS:
OTHER PLAYLISTS:
► Learning Math Series
►Cool Math Series:
BECOME A MEMBER:
MATH BOOKS & MERCH I LOVE:
SOCIALS:
 0:06:41
0:06:41
How to Solve Constant Coefficient Homogeneous Differential Equations
 0:11:50
0:11:50
Constant Coefficient ODEs: Real & Distinct vs Real & Repeated vs Complex Pair
 0:04:22
0:04:22
Constant Coefficient ODEs: Example 1 with Real and Complex Roots
 0:07:49
0:07:49
Constant Coefficient ODEs with Distinct Real Roots
 0:05:02
0:05:02
Constant Coefficient ODEs: Example 1 with Distinct Real Roots
 0:06:05
0:06:05
Constant Coefficient ODEs: Example 1 with Repeated Real Roots
 0:02:59
0:02:59
Constant Coefficient ODEs Example 2 with Distinct Real Roots
 0:11:44
0:11:44
Second order homogeneous linear differential equations with constant coefficients
 0:11:19
0:11:19
Higher Order Constant Coefficient Differential Equations: y'''+y'=0 and y'&...
 0:05:35
0:05:35
Homogeneous, second-order, constant coefficient ode with two real roots
 0:07:39
0:07:39
Linear ODE with Constant Coefficients: Complex Roots with Nonzero Real Parts
 0:25:17
0:25:17
Second Order Linear Differential Equations
 0:05:06
0:05:06
Second-order, linear, homogeneous odes with constant coefficients (Part II: real, distinct roots)
 0:03:02
0:03:02
Constant Coefficient ODEs: Example 1 with Distinct Complex Roots
 0:05:41
0:05:41
Differential Equations | Homogeneous 2nd Order ODEs with constant coefficients| Distinct real roots
 0:12:44
0:12:44
Undetermined Coefficients: Solving non-homogeneous ODEs
 0:04:17
0:04:17
Constant Coefficient ODEs: Example 1 with Repeated Complex Roots
 0:09:49
0:09:49
Differential Equations - 24 - 2nd Order - Complex Roots (r=a+bi)
 0:06:46
0:06:46
2nd Order ODEs - Constant Coefficient | Definition & Worked examples: Real, Repeated & Compl...
 0:07:21
0:07:21
Constant Coefficient ODEs with the Rational Root Theorem: Example 1
 0:04:39
0:04:39
Constant Coefficient ODEs: Example 2 with Repeated Real Roots
 0:45:11
0:45:11
Second Order Linear Constant Coefficient ODEs Part 1
 0:08:03
0:08:03
Linear ODEs with Constant Coefficients: Repeated Roots
 0:05:44
0:05:44
Homogeneous, second-order, constant-coefficient ode with complex roots
Комментарии