filmov
tv
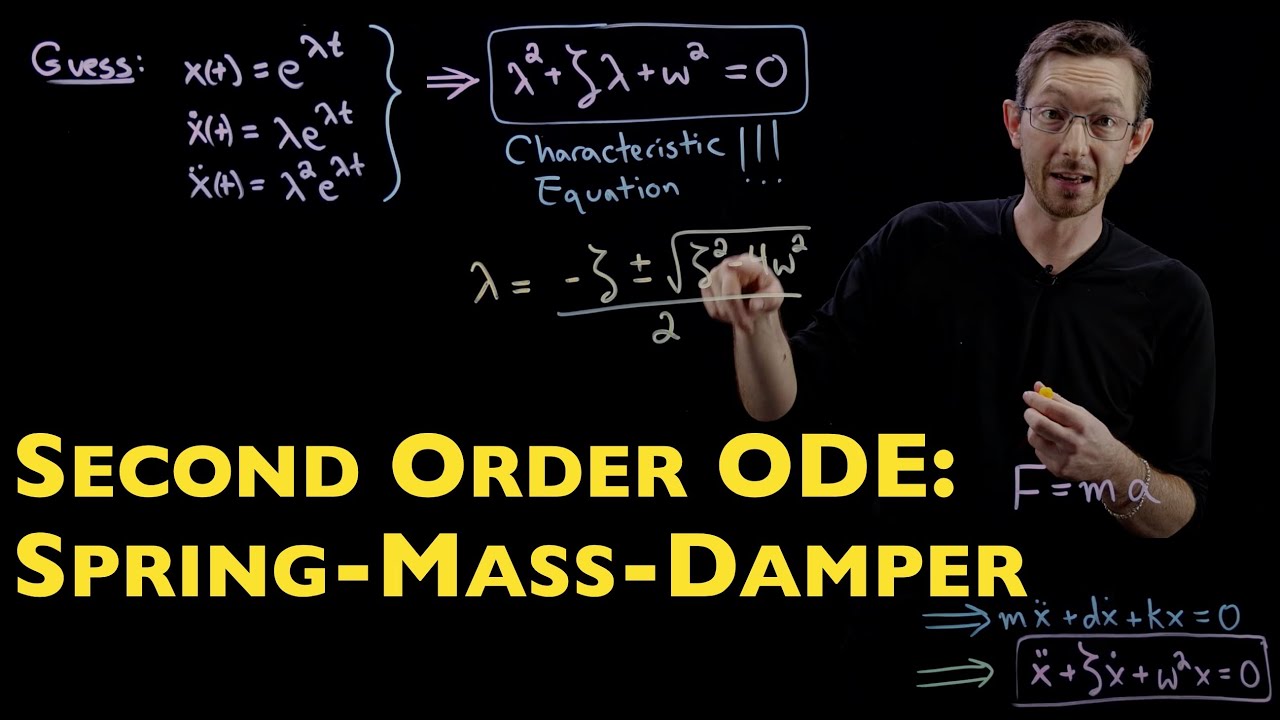
Example Second-Order ODE: Spring-Mass-Damper
Показать описание
This video solves an important second-order ordinary differential equation (ODEs): The damped harmonic oscillator for a mass on a spring with damping. We solve this by hand and also plot the solution in Python and Matlab.
@eigensteve on Twitter
This video was produced at the University of Washington
%%% CHAPTERS %%%
0:00 Deriving the Spring-Mass-Damper Equations from F=ma
6:46 Solve the Equation by Guessing Solution x(t) = exp(a*t)
9:35 The Characteristic Equation
14:54 Using Initial Conditions to Find Undetermined Coefficients
18:08 Writing as a Matrix System of Equations
21:12 Matlab Code Example
30:44 Python Code Example
@eigensteve on Twitter
This video was produced at the University of Washington
%%% CHAPTERS %%%
0:00 Deriving the Spring-Mass-Damper Equations from F=ma
6:46 Solve the Equation by Guessing Solution x(t) = exp(a*t)
9:35 The Characteristic Equation
14:54 Using Initial Conditions to Find Undetermined Coefficients
18:08 Writing as a Matrix System of Equations
21:12 Matlab Code Example
30:44 Python Code Example
 0:33:00
0:33:00
Example Second-Order ODE: Spring-Mass-Damper
 0:36:24
0:36:24
Second order differential equation for spring-mass systems
 0:04:32
0:04:32
Spring mass damper system - Equations of motion
 0:09:20
0:09:20
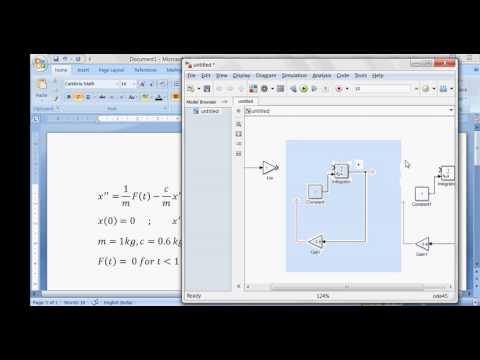
Solving second order ordinary differential equation using simulink - spring mass damper
 0:11:16
0:11:16
Mechanical Vibrations: Underdamped vs Overdamped vs Critically Damped
 0:21:00
0:21:00
Modeling Mass-Spring-Damper Systems - 2nd Order ODEs
 0:08:10
0:08:10
Undamped Mechanical Vibrations & Hooke's Law // Simple Harmonic Motion
 0:16:13
0:16:13
Free Oscillation | Application of Second Order Differential Equation (Spring-Mass System)
 0:37:02
0:37:02
Second-Order Ordinary Differential Equations: Solving the Harmonic Oscillator Four Ways
 0:07:52
0:07:52
Intro to Mass-Spring Oscillator (Second-Order Differential Equation)
 0:17:24
0:17:24
Second-order ODE Tutorial
 0:12:41
0:12:41
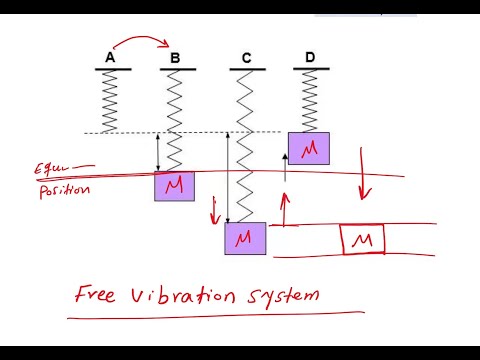
Application of second order diff. eq. (Mass Spring System), Free vibration system
 0:07:06
0:07:06
2.3 Second-order ODE - Damped systems
 0:27:52
0:27:52
PART II: SOLVING DIFFERENTIAL EQUATION OF A SPRING MASS DAMPER SYSTEM
 0:12:00
0:12:00
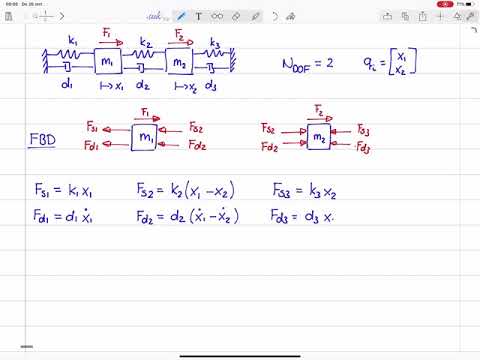
Mechanical Vibrations 8 - Newton 2 - Double Mass-spring-damper system
 0:07:45
0:07:45
Session 24: Modeling and idea on Damped Mass Spring system ( Part II).
 0:59:55
0:59:55
Introduction to Spring-Mass Second Order ODE
 0:09:07
0:09:07
Class 02 ODE Modeling: Spring-Mass-Damper Dynamics
 0:18:42
0:18:42
Session 23: Modeling of Undamped Mass Spring system with some examples (Part I).
 0:05:47
0:05:47
Class 04 ODE Alternatives: Spring Mass Damper in State Space
 0:12:08
0:12:08
Runge Kutta Second order problems solved for airdrag, coulomb, spring mass damper
 0:09:43
0:09:43
Coupled oscillators | Lecture 46 | Differential Equations for Engineers
 0:08:00
0:08:00
3.6 part 4: Modeling Forced Damped Oscillations using Differential Equations
 0:10:06
0:10:06
Class 03 Laplace Transform: [Activity] Spring-Mass-Damper Transfer Function *
Комментарии